主营:欧姆龙,三菱,安川,Pro-face
主营:欧姆龙,三菱,安川,Pro-face
首页 > 工控百科 > 安川 > 驱动器SGDV系列 > 驱动器SGDV-1R6A11B连接电源调整时的安全注意事项
分类+
进行调整时,请以适当的条件设定下列 (1)~ (5)项所示的伺服单元保护功能。
(1)超程的设定
请设定超程。有关详细内容,请参照 “5.2.4 超程”。
(2)设定推力限制
推力限制功能是运算处理出机械运行所需的推力,为使其不超出该值而对输出推力进行限制的功能。在机械发生干扰或碰撞等故障时可以减轻冲击。若将推力设定在运行所需的值以下,则有可能发生超调或者振动。
详情请参照 “5.8 推力限制的选择”。
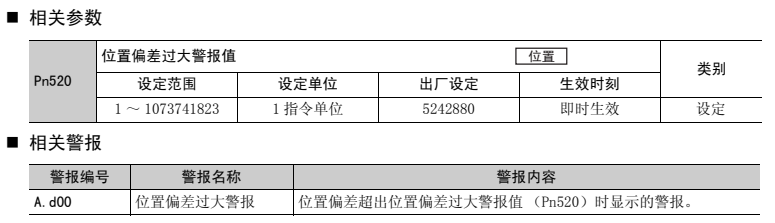
(3)设定位置偏差过大警报值
位置偏差过大警报是在位置控制下使用伺服单元时生效的保护功能。
在电机动作与指令不符时,通过设定适当的位置偏差过大警报值,可以检出异常情况,使电机停止运行。
位置偏差是指位置指令值与实际位置的差。
位置偏差可以用下面的位置环增益 (Pn102)与电机速度的关系式来表示。

* 确认 Pn102 的设定时,请将参数显示设定为 “显示所有参数”(Pn00B.0=1)。
双下划线部分的 “× (1.2 ~ 2)”是为避免位置偏差过大警报 (A.d00)频繁发生的余量系数。
只要保持上式的关系进行设定,在常规运行时就不会发生位置偏差过大警报。
当由于电机动作与指令不符而发生位置偏差时,则会检出出异常情况,使电机停止运行。
当位置指令的加减速度超出电机的追踪能力时,跟随滞后将变大,从而导致位置偏差不能满足上述关系式。请
将位置指令的加减速度降至电机能追踪的值,或增大位置偏差过大警报值。
(4)设定振动检出功能
请通过振动检出的检出值初始化 (Fn01B),为振动检出功能设定适当的值。有关详细内容,请参照 “7.16 对振动检出的检出值初始化 (Fn01B)”。
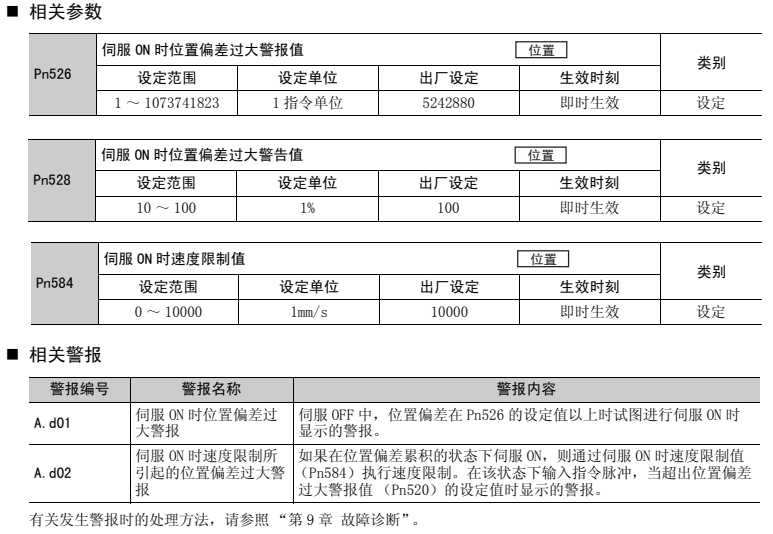
(5)设定伺服 ON 时位置偏差过大警报值
如果在位置偏差累积的状态下将伺服置为 ON,为使位置偏差变为 “0”,电机将返回原来的位置,从而引发危险。为避免该类情况发生,可在伺服 ON 时设定位置偏差过大警报值,对动作进行限制。
相关参数和警报如下所示。
专注服务于工控领域 7×8小时售后支持
全方位的技术支持 因为专注所以专业

