主营:欧姆龙,三菱,安川,Pro-face
主营:欧姆龙,三菱,安川,Pro-face
作者:
申纯太 谭福生 杨军
上海电气集团股份有限公司中央研究院
挑战:
需要 CompactRIO 同时控制多个设备运动。2 根 5 自由度机械臂运动,头部 1 自由度旋转运动,双主动轮底盘运动控制。CompactRIO 内要部署机械臂运动控制算法,LIDAR 数据采集和导航避障算法,基于编码器和光雷达数据以及 FPGA的移动位置控制算法等。
应用方案:
将机器人的功能进行划分为两部分。将双 5 自由度机械臂运动,头部 1 自由度的旋转运动,双主动轮底盘的运动,光雷达数据采集处理和编码器数据采集,自主导航,轮椅模式切换判断,机器人体表 LED 状态情感或信息显示,电池电源管理等基本行为和设备层控制归为一部分,由“小脑”控制;将家庭智能家居网络交互,其他智能机器人监控,语音识别对话和人脸识别的人机交互功能等归为一部分,由“大脑”控制。
使用的产品:
NI-cRIO9024
cRIO-9113
NI 9403
NI 9205
NI 9264
NI 9485
LabVIEW 2009 RT,FPGA
介绍:
本方案的背景是国家 863 多机器人系统控制项目的一个主角,家居监控机器人,它的设计概念主要是面向未来老年家庭,负责通过网络监控家居环境中的各种家电,具有语音和人脸识别等人机交互功能,具有双机械臂完成一些取物、递送等任务,并且可以作为智能轮椅载人移动。在 2010 世博会沪上生态家案例馆中展出。
正文:
选用 NI CompactRIO作为机器人的“小脑”。NI CompactRIO是美国 NI公司的工业级嵌入式控制器,集成以太网接口和 RS232串行接口,具有体积小,高可靠性,高性能,低功耗等优点。
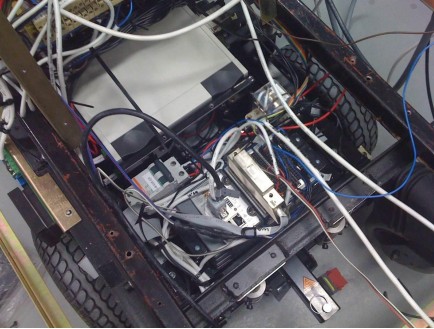
图 1主控制器Compact RIO 的安装位置
将各种设备的控制算法例如机械臂运动控制,头部运动控制,导航算法,基于以太网的光雷达数据采集,与大脑通讯等程序部署在 RT 中;将数字信号采集,例如限位开关和紧急停止逻辑还有编码器数据采集和处理,地盘运动伺服控制等算法部署在 FPGA中。
选用工业嵌入式触摸平板电脑 IPC 作为机器人的“大脑”。部署 WinCE,具有人机界面功能以及触摸屏交互功能,部署控制人脸识别模块以及语音识别算法,智能家居监控管理算法等。
用 FSM来封装每个设备对象:
Finite-state machine (FSM)称为有限状态机广泛用于数字电路和计算机程序。我们使用了两种状态机来封装设备。String Based Queued State Machine基于字符串队列状态机和普通基于枚举的状态机。使用状态机作为一种机制来处理单个设备的状态转换,或者说,用状态机这种行为模型来用于单个设备的事件处理。
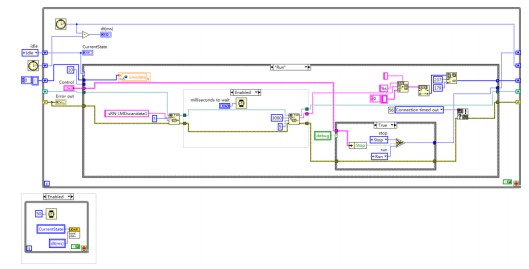
图 2 LIDAR 状态机
例如光雷达的状态机框图,它具有 4个状态,Idle,Start,Running,Stop。在 Running状态中,程序不断向光雷达发送指令读取数据,然后由一个 Shared Variable来传出数据。使用一个 LIRAR.vi来封装这个状态机。
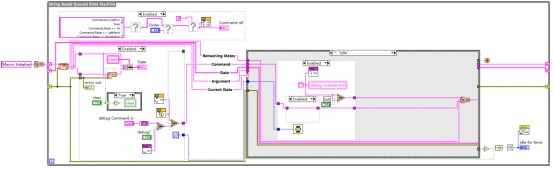
图 3是一个远程控制指令解析状态机,它使用 String Based Queued State Machine 来实现。这样的好处是,可以使用队列来组织动作,较为灵活地实现各种不同组合以及复杂度。
每一个设备的状态机都用一个独立的 vi来封装,并且单独进行测试,这样也有利于工程化。
多状态机的协作:
单个状态机只能完成部分功能,我们需要把所有设备状态机集成起来,按照一定的通讯机制拼装成一个完整的机器人。
由于所有的设备状态机都由一个 VI 来封装,只需要把他们拖入一个主 vi 中,就能调用他们。如图所示:
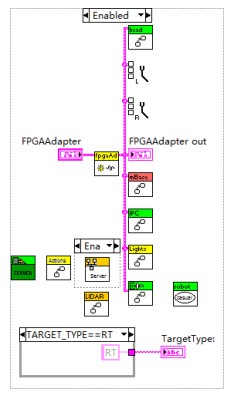
图 4状态机集成
状态机之间是通过 Shared Variable 来实现接受外部指令输入以及自身状态输出的。同样,这些Shared Variable都用一个 VI进行封装以便进行管理。
这样,一个状态机便可视为一个子系统。既然是系统,自然有系统的输入和输出,通过 get,set 等方法的 vi,外部系统便可对这些子系统进行操作或者交互。如图所示,底盘状态机使用 getCommand.vi方法获取外部命令。
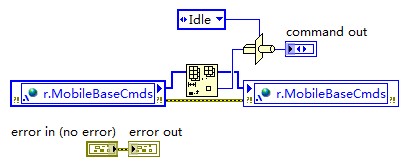
图 5 getCommand.vi
使用 setCommand.vi方法让外部系统传输命令给地盘状态机。
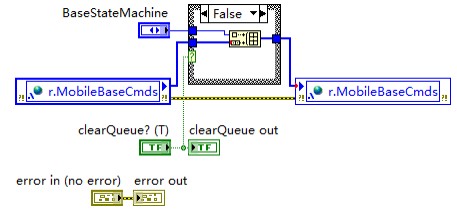
图 6 MobileBase.lvlib:setCommand.vi
底盘使用 sendState.vi发送底盘状态机状态信息。如图所示:

图 7 MobileBase.lvlib.sendState.vi
使用 getState.vi方法获取地盘状态机信息。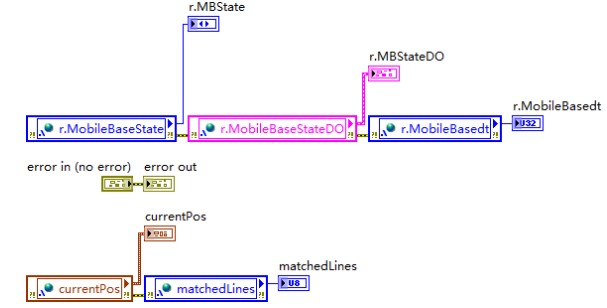
图 8 getState.vi
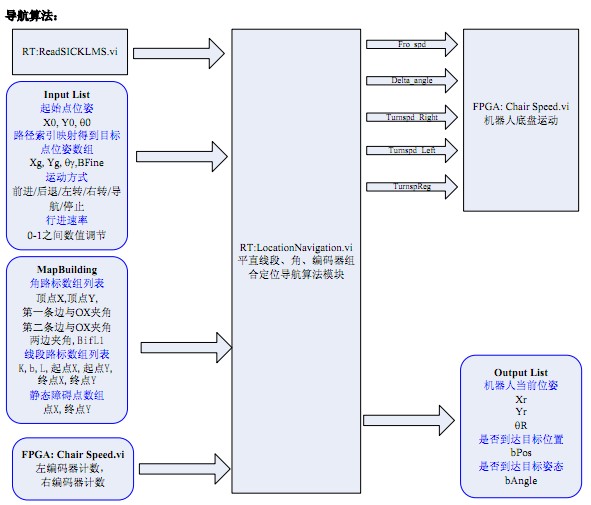
图 9 家居监控机器人定位导航软件控制框图
总体设计
针对移动机器人家居环境下的定位问题,提出了一种结合平直线段匹配、角匹配和里程计的组合定位方法。该系统采用了 Labview 开发平台和 CompactRIO 控制器,得到了很好的实时性效果。机器人首先通过二维激光测距仪通过 TCP/IP 得到环境点信息,然后通过迭代适应点(IEPF)算法得到环境线段及最小二乘法得到线段参数。在基于线段基础上,得到局部的平直线段和角特征,再与已知平直线段和角特征做匹配,通过平直线段和角匹配算法实时更新机器人位置和姿态。分析里程计定位、平直线段匹配定位和角匹配定位的误差,分配不同的权重得到优化的组合定位算法。
软件控制框图
基于以上的设计,定位导航的软件控制模块设计如图 7所示。中心模块为定位导航模块,该模块读取起点、目标点、运动模式数据及编码器数据,同时读取激光测距仪数据提取角、平直线段特征和已知特征做匹配,其匹配算法输出机器人位姿 。对于给定的目标位姿,该模块将计算出驱动指令
。对于给定的目标位姿,该模块将计算出驱动指令
(Forward Speed、Delta angle、Turnspd Right、Turnspd Left对应前进速度、方向转角、左转、右转)和状态信息如(bPos, bAngle)来判断机器人是否到达目标位置和姿态。
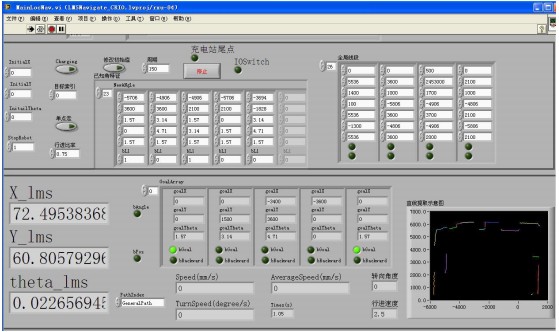
图 10 家居监控机器人定位导航的输入输出信息部分
图 10 为定位导航模块部分的输入输出部分,上半部分的输入信息中的已知角特征和全局线段为为已知地图信息,下半部分的部分输出信息包括直线段提取示意图,路径任务数组信息图,实时显示的机器人当前位置信息、速度信息等。
线段特征提取
为得到环境的几何线段信息,需要对激光测距仪的点集进行分割,其分割算法可分为下列步骤:坐标变换、区域分割、IEPF 线段提取和最小二乘法计算线段参数。其中区域分割:从初始点 i=0 开始检测两相邻点 的距离,如距离值小于阈值 D,则认为属于同一区域点集,否则开始一个新的区域。该过程遍历所有点集。如果某区域点数目小于 4 个,则认为噪声区域,舍弃这些噪声点。
的距离,如距离值小于阈值 D,则认为属于同一区域点集,否则开始一个新的区域。该过程遍历所有点集。如果某区域点数目小于 4 个,则认为噪声区域,舍弃这些噪声点。
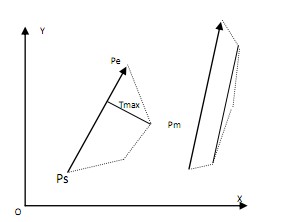
图 11 IEPF 线段提取
IEPF提取线段:对于上述得到区域可能含有多条线段,IEPF线段提取算法是一种有效的线段提取
方法。如图 11所示, Pm点到线段 PsPe的距离大于阈值 T,该方法把点集

 IEPF为迭代算法,对于
IEPF为迭代算法,对于 重复上述的算法知道
重复上述的算法知道 小于阈值T。该算法也有分割过细的时候,如图 9右半部中间两条线段可通过检查线段参数的办法,对于斜率倾角误差小于一定阈值的线段加以合并处理。线段参数可通过最小二乘法计算求得。
小于阈值T。该算法也有分割过细的时候,如图 9右半部中间两条线段可通过检查线段参数的办法,对于斜率倾角误差小于一定阈值的线段加以合并处理。线段参数可通过最小二乘法计算求得。
如图 12所示为通过Labview实现的 IEPF算法的区域分割算法,其中子 VI 为 IEPF算法分割出的子区域。
为 IEPF算法分割出的子区域。
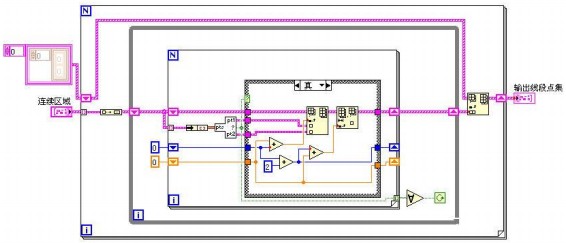
图 12 包含 IEPF 算法的区域分割算法
具体组合定位算法可参考作者的另一篇发表在 IEEE ICIA2010 题为《A Corner and Straight line Matching Localization Method for Family Indoor Monitor Mobile Robot》的论文。
原型机照片:

图 13 家居监控机器人在世博沪上生态家
总结:
使用 CompactRIO作为机器人主控制器配有集成的 FPGA的支持,具有性能优越,体积小,安全可靠,低功耗等特点,并且,数据采集能力和通讯能力强大,非常适合移动机器人的原型开发。
可以基于 LabVIEW 来开发机器人程序,相比字符代码程序,图形 G语言程序可以用图形来阅读,有利于理解和调试,再者 LabVIEW仍旧可以运用很多软件工程方法,使得它具有自己独特的优势。
 才茂基于GPRS网络与GPS卫星定位的出租车(公交车)调度管理
一、 引言随着国内经济的飞速发展,人们出行在外应用出租车和公交车等交通工具是必不可少的,然而运输管理的的成本也是成为了现在客运公司考虑的首要问题,为了提高工作效率以及服务水平,这需要企业能够及时、准
基于Labview与交流伺服电机的车辆换挡杆试验系统研究
作者:徐 猛 -1、引言车辆各系统及零部件的疲劳耐久性能是评价汽车质量的重要指标。因此开发通用的耐久试验装置对各零部件进行测试是车辆开发过程中的极为重要的工作。本文以某款车型的换挡杆耐久试验台的搭建
厦门计讯塔吊远程监控系统
系统背景在科技飞速发展的今天,采用高科技通信手段来预防和制止各种危害事件的发生,成为各行各业保护单位和职工、群众的生命财产安全,保证各种设备的正常运转的有力措施。随着无线传输技术、工业监测和控制技术
才茂基于GPRS网络与GPS卫星定位的出租车(公交车)调度管理
一、 引言随着国内经济的飞速发展,人们出行在外应用出租车和公交车等交通工具是必不可少的,然而运输管理的的成本也是成为了现在客运公司考虑的首要问题,为了提高工作效率以及服务水平,这需要企业能够及时、准
基于Labview与交流伺服电机的车辆换挡杆试验系统研究
作者:徐 猛 -1、引言车辆各系统及零部件的疲劳耐久性能是评价汽车质量的重要指标。因此开发通用的耐久试验装置对各零部件进行测试是车辆开发过程中的极为重要的工作。本文以某款车型的换挡杆耐久试验台的搭建
厦门计讯塔吊远程监控系统
系统背景在科技飞速发展的今天,采用高科技通信手段来预防和制止各种危害事件的发生,成为各行各业保护单位和职工、群众的生命财产安全,保证各种设备的正常运转的有力措施。随着无线传输技术、工业监测和控制技术
 海为空压机系统远程监控解决方案
作者:海为技术支持部空压站的主设备为空气压缩机,空气干燥器,配套过滤器,储气罐,连接管道和阀门等组成一供气系统。大型空压站通常拥有多套设备,以保证不同负荷的需求。确保合格的供气品质,满足稳定的气源压
海为空压机系统远程监控解决方案
作者:海为技术支持部空压站的主设备为空气压缩机,空气干燥器,配套过滤器,储气罐,连接管道和阀门等组成一供气系统。大型空压站通常拥有多套设备,以保证不同负荷的需求。确保合格的供气品质,满足稳定的气源压
 基于台达自动化平台构建的大幅面多色印刷机网络系统
河南新机股份有限公司 宋成丰 裴建才摘 要:本文详细介绍了台达人机界面、文本显示器、EH系列可编程控制器、V及B型交流变频器构成的控制系统在河南新机股份有限公司生产的XJ4142大全张四色胶印机
基于台达自动化平台构建的大幅面多色印刷机网络系统
河南新机股份有限公司 宋成丰 裴建才摘 要:本文详细介绍了台达人机界面、文本显示器、EH系列可编程控制器、V及B型交流变频器构成的控制系统在河南新机股份有限公司生产的XJ4142大全张四色胶印机
 威盛嵌入式主板VAB-1000在停车场视频监控管理系统中的应用
近年来,随着社会经济和科学技术的飞速发展,城乡居民的生活水平有了显著的提高,衣食住行等基本生活条件不断改善,随着城市的发展速度逐步加快,住房越来越远,人们对私家车的需求日益增加,车辆的密集度已成为全
威盛嵌入式主板VAB-1000在停车场视频监控管理系统中的应用
近年来,随着社会经济和科学技术的飞速发展,城乡居民的生活水平有了显著的提高,衣食住行等基本生活条件不断改善,随着城市的发展速度逐步加快,住房越来越远,人们对私家车的需求日益增加,车辆的密集度已成为全
 电力监控系统在中国第一汽车集团公司数据中心机房建设项目两个变电所中的应用
赵斌安科瑞电气股份有限公司上海嘉定摘要:基于目前科学技术飞速发展,人们对电力资源的依赖越来越广泛,而现阶段国内电力系统的运营成本还相对较高,因此完善电力系统各方面的工作已经势在必行。电力监控系统在整个
电力监控系统在中国第一汽车集团公司数据中心机房建设项目两个变电所中的应用
赵斌安科瑞电气股份有限公司上海嘉定摘要:基于目前科学技术飞速发展,人们对电力资源的依赖越来越广泛,而现阶段国内电力系统的运营成本还相对较高,因此完善电力系统各方面的工作已经势在必行。电力监控系统在整个
 基于台达机电技术的伺服成型包覆丝机自动化设计
中达电通股份有限公司 谢伟伟 摘 要:在简要介绍包覆丝机工作原理的基础上重点研讨伺服成型包覆丝机自动化系统设计术。系统基于PLC控制平台与触摸屏、变频器、伺服驱动的集成控制结构。 关键
基于台达机电技术的伺服成型包覆丝机自动化设计
中达电通股份有限公司 谢伟伟 摘 要:在简要介绍包覆丝机工作原理的基础上重点研讨伺服成型包覆丝机自动化系统设计术。系统基于PLC控制平台与触摸屏、变频器、伺服驱动的集成控制结构。 关键
专注服务于工控领域 7×8小时售后支持
全方位的技术支持 因为专注所以专业