主营:欧姆龙,三菱,安川,Pro-face
主营:欧姆龙,三菱,安川,Pro-face
驱动单元。
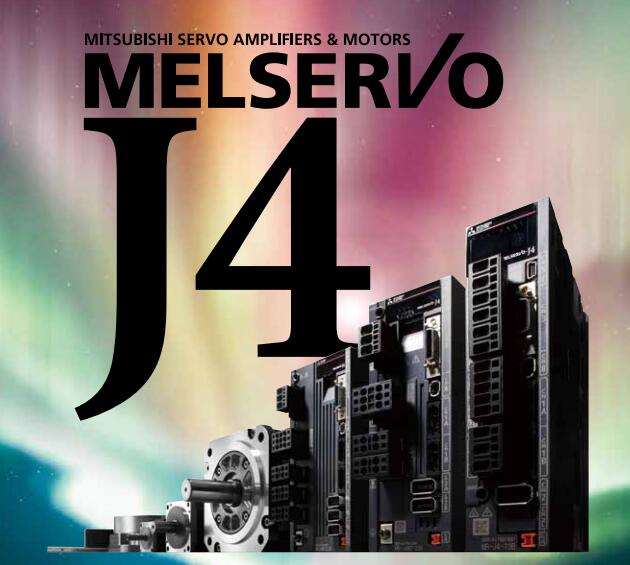
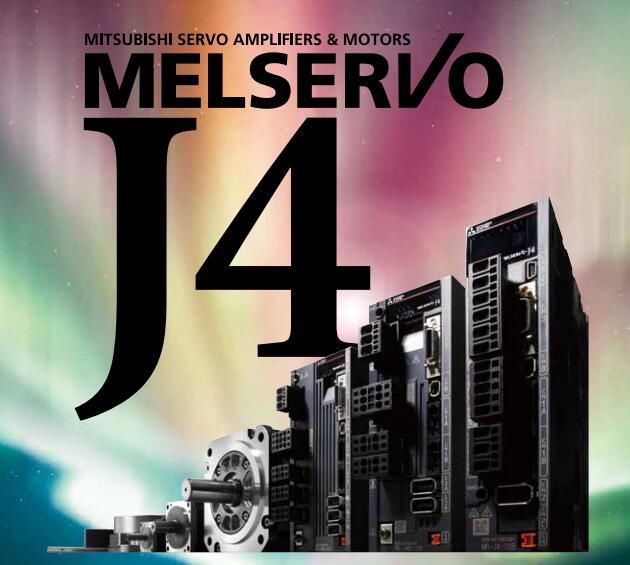
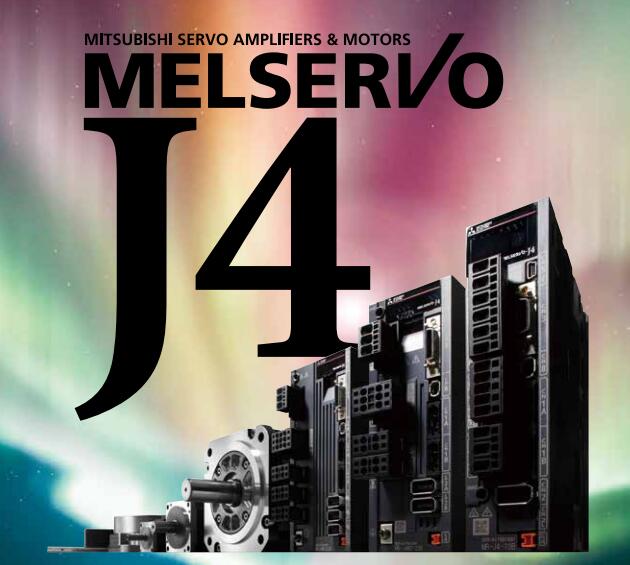
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:45kw。
接口:泛用型。
电源:三相AC400V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
三菱通用型AC伺服放大器MELSERVO-J2-Super系列。
额定输出:11.0kw。
通用接口。
电压: 3相AC400V。
功能,卓越表现。
的CPU集成,大大提高产品响应性三菱MR-J4-DU45KA4-RJ。
由于应用了的CPU,使响应性得以极大的提高。
速度环路频率响应提高到了550HZ以上。
MR-J2-Super系列是高速定位应用的佳装置。
轻松调皆。
模型自适应控制/实时自动调谐。
机械分析功能。
可以分析机械系统的频率特性,在结果下就可轻松设置“机械共振抑止滤波器”
机械模拟功能。
不用实际更换电机就可实现该功能。读入机械分析结果模拟用户机械系统的响应。驱动器:MR-H_ACN系列CC-LINK功能。
额定输出:2.0KW三菱MR-J4-DU45KA4-RJ。
这种测试系统由两部分组成,分别是被测伺服驱动器—电动机系统和上位机。
上位机将速度指令信号发送给伺服驱动器,
伺服驱动器按照指令开始运行。
在运行过程中,上位机和数据采集电路采集伺服系统的运行数据,
并对数据进行保存、分析与显示。由于这种测试系统中电机不带负载,
所以与前面两种测试系统相比,该系统体积相对减小,
而且系统的测量和控制电路也比较简单,
但是这也使得该系统不能模拟伺服驱动器的实际运行情况。
通常情况下,此类测试系统仅用于被测系统在空载情况下的转速和角位移的测试,
而不能对伺服驱动器进行而准确的测试。MR-J2M多轴伺服放大器驱动单元。
额定输出:0.1kw。
采典型的例子三菱MR-J4-DU45KA4-RJ。
2、在没有机械连接的情况下,由输入轴控制位于远处的输出轴,实现远距同步传动。
3、使输出机械位移地跟踪电信号,如记录和指示仪表等。1轴伺服放大器。
三菱通用AC伺服放大器MELSERVO-J4系列。
额定输出:12.0kw。
接口:SSCNETⅢ/H。
电源:三相AC200V。
支持SSCNETⅢ/H的伺服放大器。
可组建使用高速串行光通讯的完全同步系统。
可与伺服系统控制器组合,大化发挥伺服系统的功能性能。
业界水平的速度频响2.5kHz放大器、电电机、以及光纤网络协奏的异次元交响曲三菱伺服驱动器。
采用传统二自由度模型适应控制进一步优化的高速伺伺服控制结构的专用执行引擎三菱伺服驱动器。
实现了业内快速2.5kHz的速度频率响应。
结合三菱自主研发的高分辨率对位置编码器(4,194,304pulses/rev),
大幅提高了处理速度。可大限度地发挥机械的性能。
产品简介:
伺服驱动器 MR-J4-DU55KA4-RJ
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:55kw。
接口:泛用型。
电源:三相AC400V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU30KB4
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:30kw。
接口:SSCNETⅢ/H。
电源:三相AC400V。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU45KB4-RJ
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:45kw。
接口:SSCNETⅢ/H。
电源:三相AC400V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU55KB4-RJ
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:55kw。
接口:SSCNETⅢ/H。
电源:三相AC400V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU30KB
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:30kw。
接口:SSCNETⅢ/H。
电源:三相AC200V。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU30KA4-RJ
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:30kw。
接口:泛用型。
电源:三相AC400V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU30KB4-RJ
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:30kw。
接口:SSCNETⅢ/H。
电源:三相AC400V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU37KA
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:37kw。
接口:泛用型。
电源:三相AC200V。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU37KB4-RJ
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:37kw。
接口:SSCNETⅢ/H。
电源:三相AC400V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU37KB-RJ
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:37kw。
接口:SSCNETⅢ/H。
电源:三相AC200V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU55KA4
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:55kw。
接口:泛用型。
电源:三相AC400V。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU37KA-RJ
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:37kw。
接口:泛用型。
电源:三相AC200V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU30KA4
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:30kw。
接口:泛用型。
电源:三相AC400V。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
产品简介:
伺服驱动器 MR-J4-DU37KA4-RJ
驱动单元。
三菱泛用型AC伺服放大器MELSERVO-J4系列。
额定输出:37kw。
接口:泛用型。
电源:三相AC400V。
特殊规格:全封闭控制4线式/支持机械端编码器ABZ相输入/支持定位模式。
支持位置控制,速度控制,转矩控制。
位置控制遵循位置指令进行定位。
使用同步控制、插入控制时,执行位置控制。
速度控制遵循速度指令将速度控制在一定范围内。
转矩控制为遵循转矩指令控制稳定转矩。
可切换增幅的功能。可切换旋转过程中与停止中的增幅,
并在运行过程中使用切换信号,切换增幅。
专注服务于工控领域 7×8小时售后支持
全方位的技术支持 因为专注所以专业