资料介绍
输出方式: C500-NC211与伺服驱动器连接,通过。
SYSMAC传送位置数据, 进行定位。
运动控制(MC)是自动化的一个分支,
它使用通称为伺服机构的一些设备如液压泵,
线性执行机或者是电机来控制机器的位置或速度CP1L-M40DT-D操作手册。
运动控制在机器人和数控机床的领域内的应用要比在专用机器中的应用更复杂,
因为后者运动形式更简单,通常被称为通用运动控制(GMC)。
运动控制被广泛应用在包装、印刷、纺织和装配工业中。10点输入输出型。
连接器(MIL)。
需要I/O连接器数:2个。
输入:DC24V,6点。
输出:晶体管(漏型),4点CP1L-M40DT-D操作手册。
计时:-。
高功能、大192点输入输出、节省了宽度的小机型。
与CPM2A有相同功能的细长型。
在小型的外表下集合了有效控制机器的多彩的功能。
CPU具有继电器输出/晶体管输出、端子台链接器连接、时钟功能有无等多种型号(DC电源)。程序容量:15.2K字。
RS-232端口:无CP1L-M40DT-D操作手册。
数据存储器(DM):6K字。
扩展数据内存(EM):6K字。
处理时间(基本指令):0.15μs。
I/O点数:1184点。
I/O扩展单元的台数:3台。
多点I/O(组2)可装载台数:16台(1单元占用单元)。
多点I/O(组2)可装载台数:8台(2单元占用单元)欧姆龙CP1L-M40DT-D手册。
总线I/O的可装载台数:16台(1单元占用单元)。
为高水平控制而设计的。
变革生产现场的「情报化」、「标准化」
为了适应消费者多样化的需要,
要求生产不同的品种、数量,缩短开发周期、降低成本等。
制造业正面对着十分严唆的形势。
因而在生产上愈发要求提率,机动灵活。
从而,情报化_、标准化成为当务之急欧姆龙CP1L-M40DT-D手册。
为实现此目标,各销售部门配置的不同网络、专为用户特定编制的软件工具的使用环境力求统一。
适应多通道控制的元器件也正日益步入商品化阶段。输入输出点数:分别2点。
信号范围选择:分别2点独立欧姆龙CP1L-M40DT-D手册。
信号范围:1~5V、0~10V、-10~10V、4~20mA。
分辨率:1/4000。
转换速度:1ms/点。
外部连接:可拆卸端子块。
一个单元处理模拟输入2点和模拟输出2点。
实现1ms/点的高速处理。
可以进行由比率转换功能的简易环路控制。
具备平均化处理,峰值保持,断线测试,
输出保持,补偿,增益调整等功能。
2路输入 2路输出 转换数据16位。微波型。
由差错记录功能可以记忆在同数据载体通信中新发生的差错,
大30件,并将发生差错的内容由携带式过程控制计算机,
以新差错情报或统计差错的形式读出来。
向携带式过程控制计算机插入本装置专用的健板便可作为专工具使用,
当通信发生异常,要读出差错内容或系统开始工作需作通信测试,就立即显显出威力CP1L-M40DT-D操作手册CP1L-M40DT-D。
对于过程计算机上的信息显示,有英文、日文二方可供选择,
能由ID传感器的DIP开关进。
ID系统构筑的实现,
具备短距离通的电磁耦合方式的和长距离通信微动方式。
大502字节的数据读出、写入。
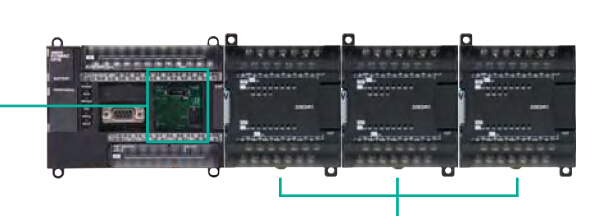
 产品名称:CPU单元
产品名称:CPU单元

_inst-0676428-7c_jpg/cpseries(iowiringdiagram)_inst-0676428-7c_1.jpg)
_inst-4074765-0e_jpg/cpseries(safetyprecautions)_inst-4074765-0e_1.jpg)