资料介绍
控制输出接口:控制MECHATROLINK-II同步通信执行的指令。
梯形图编程的直接操作。
控制模式:位置控制、速度控制或扭矩控制。
轴数:16轴。
通过简易操作、减少接线、批设置和批管理降低TCO
通过一个支持MECHATROLINK-II*的位置控制单元,对运动网络中多达16轴的伺服器进行控制C200H-MR432替换指南手册。
*MECHATROLINK-II是MECHATROLINK成员协会的注册商标。
体积更小
使用一个CJ系列单元大小的机身多可控制16个轴的定位。
紧凑型机身是满足降低多轴控制设备大小需求的佳之选。
通过灵活接线实现单电缆连接
有了MECHATROLINK-II,连接伺服驱动器是一件很容易的事C200H-MR432替换指南手册。
只使用单根电缆(2芯屏蔽双绞线电缆)。
接线减少,总电缆长度为50m(16轴为30m),为构建系统提供更多自由。
启动和维护时间减少
可以从PLC设置伺服参数。
这表明从一个位置就可以进行设置和调整,而不需要分别连接到每个伺服驱动器。
轻松扩展
可以构建可轻松扩展的系统,这样使用几个轴时的效率与以后使用多达16个轴时的效率一样高。
使用MA功能进行多轴链接操作
对线性插补新增的插补轴停止模式设置和轴间容许偏移设置使得轴之间的链接操作更容易设置。输入32点,输出32点。
实现了减少配线,在两根信号线上传送16点I/O信息的单元。
通过一对电缆可传送16点输入输出信号B7A接口单元。
作为I/化C200H-MR432替换指南手册。控制方法/控制输出接口:脉冲串输出/线性驱动器输出的开放式回路控制。
控制轴数:1轴。
两种类型可供选择:集电极开路输出和线性驱动器。
因为集电极开路输出和线性驱动器均针对1、2和4轴型号,
所以可以手头的应用选择合适的型号。
多样的功能(例如,示教、驰、齿隙补偿、区域、强制中断以及加速/减速曲线)实现了简单易用的定位。
可以在1pps单元中实现从低速到高速(高500kpps)的精细控制。
定位在从可编程控制器接收指令后2ms (大速度)内开始。
通过事先将操作模式写入PCU存储,可以从存储完成定位。
使用完成代代码可以设置三个位置模式-中断、自动和继续-以响应范围广泛的一系列操作C200H-MR432手册。无无EEP-ROMC200H-MR432手册。
RS-232C接口:2端口。
RS-422接口:1端口。
运用BASIC语言进行高速的数据处理。
多样的输入输出接口。
由高速而简单的多重任务BASIC来编程。
与PC的数据收发简单。
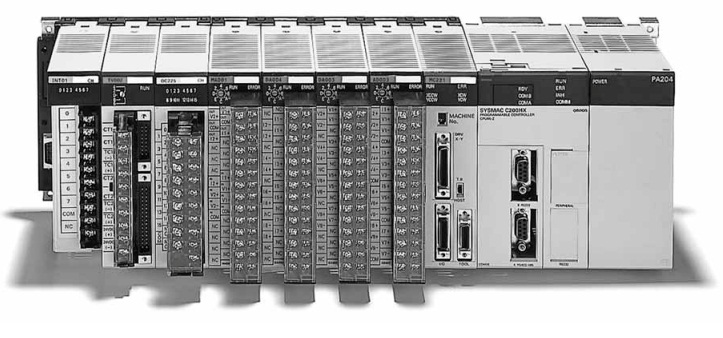
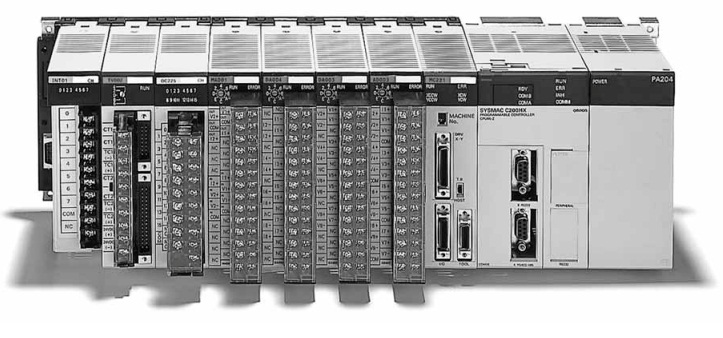
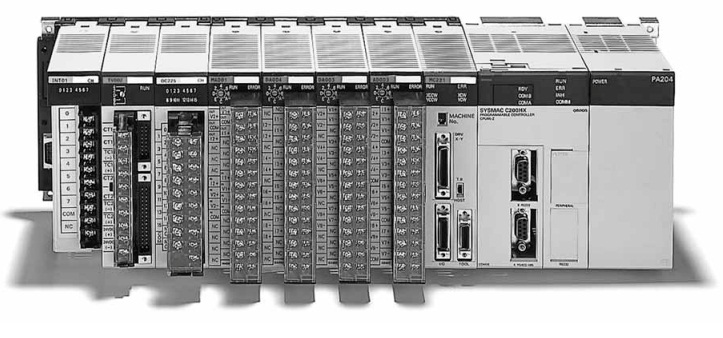
 产品名称:可编程控制器
产品名称:可编程控制器