资料介绍
控制MECHATROLINK-II同步通信执行的指令。
梯形图编程的直接操作。
控制模式:位置控制、速度控制或扭矩控制。
轴数:4轴。
通过灵活接线实现单电缆连接CV500-IPS01手册。
有了MECHATROLINK-II,连接伺服驱动器是一件很容易的事。
只使用单根电缆 ( 2芯屏蔽双绞线电缆)。
接线减少,总电缆长度为50m( 16轴为30m),
可以构建可轻松扩展的系统,
这样使用几个轴时的效率与以后使用多达16个轴时的效率一样高。
使用MA功能进行多轴链接操作。
对线性插补新增的插补轴停止模式设置和轴间容许偏移设置使得轴之间的链接操作更容易设置CV500-IPS01手册。
通过简易操作、减少接线、批设置和批管理降低TCO。
通过一个支持MECHATROLINK-II的位置控制单元,
对运动网络中多达16轴的伺服器进行控制。
体积更小,使用一个CS系列单元大小的机身多可控制16个轴的定位。
紧凑型机身是满足降低多轴控制设备大小需求的佳之选CV500-IPS01手册。
为构建系统提供更多自由。
启动和维护时间减少。
可以从PLC设置伺服参数。
这表明从一个位置就可以进行设置和调整,而不需要分别连接到每个伺服驱动器。连接的ID系统:1头。
使用的单元编号:1个单元编号。
RFID V680专业通信单元可直接连接。
欧姆龙PLC CJ/CS/NJ系列。
用于直接连接RFID V680系列 (可随处使用)和PLC的通信单元欧姆龙CV500-IPS01主机连接系统操作手册。
允许32kb数据的批传送。
只需在PLC存储区域设置参数即可轻松读写数据。
比串行通信更简单的设备配置允许更快的数据处理。
利用梯形图程序中的功能块(FB)库,可以轻松制作通信程序。输出点数:16点高速、漏型。
额定电压:DC24V欧姆龙CV500-IPS01主机连接系统操作手册。
大负载电流:0.5A/点5A/单元。
外部连接:可拆卸端子块。
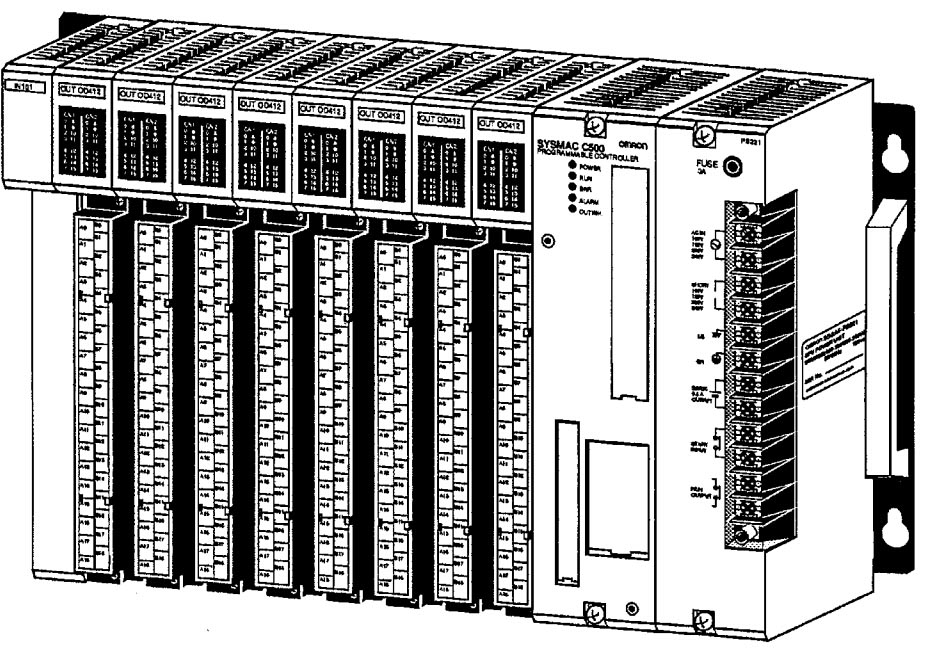
用于高速输出和不同应用的各种基本输出单元。
这些输出单元从CPU单元接收输出指令的结果并执行外部设备的ON/OFF控制。
高速输出型号CJ1W-OD213和CJ1W-OD234可以帮助提高系统总处理能力欧姆龙CV500-IPS01主机连接系统操作手册。
提供了高速输出型号以满足各种应用。
ON响应时间:15μs,OFF响应时间:80μs
输出单元具有三种输出类型中的任何一种:继电器接点输出、三端双向输出或晶体管输出。
对于晶体管输出,可在漏型输出或源型输出中进行选择。
还提供具有负载短路保护的输出单元。*1
选择每个应用的佳接口:Fujittsu连接器或MIL连接器CV500-IPS01。*2
提供了各种连接器-端子块转换单元,使您可可以方便地对外部输出设备进行布线CV500-IPS01手册。
*1.以下单元具有负载短路保护:CJ1W-OC202、CJ1W-OD204、CJ1W-OD212和CJ1W-OD232。
*2.可用于具有32点输出或64点输出的型号。
 产品名称:PLC
产品名称:PLC