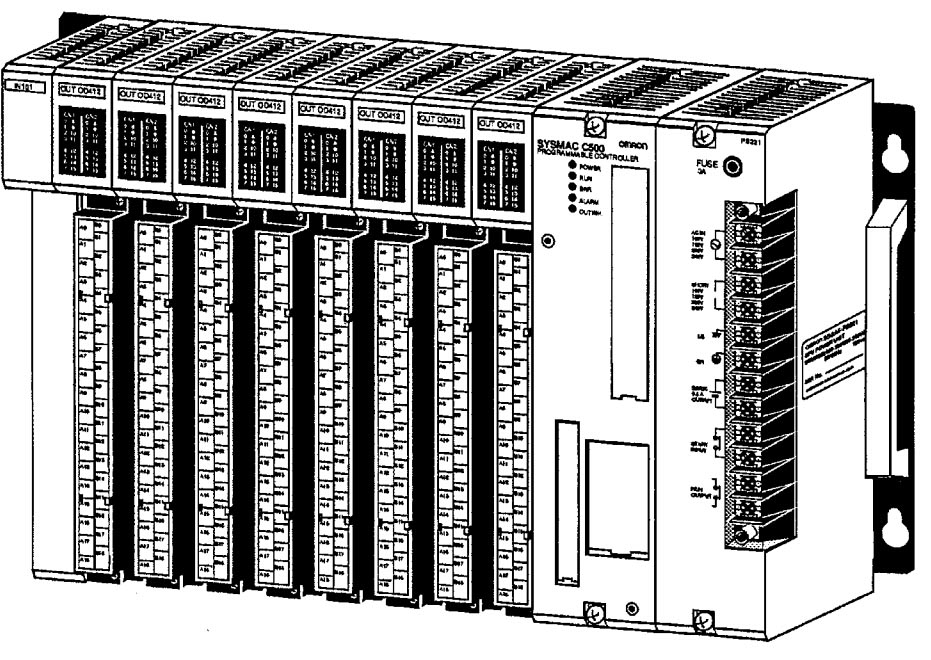
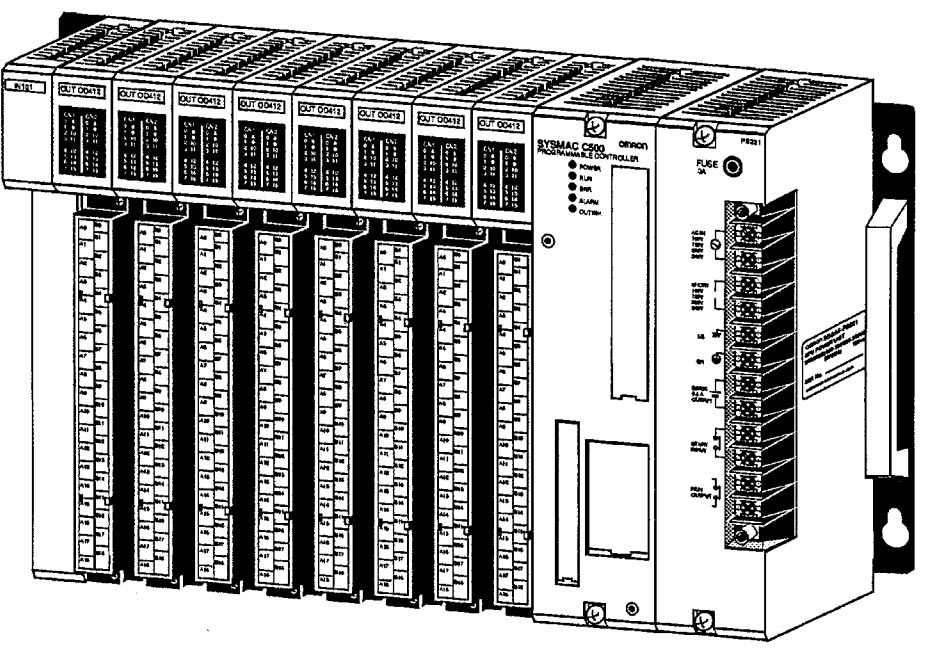
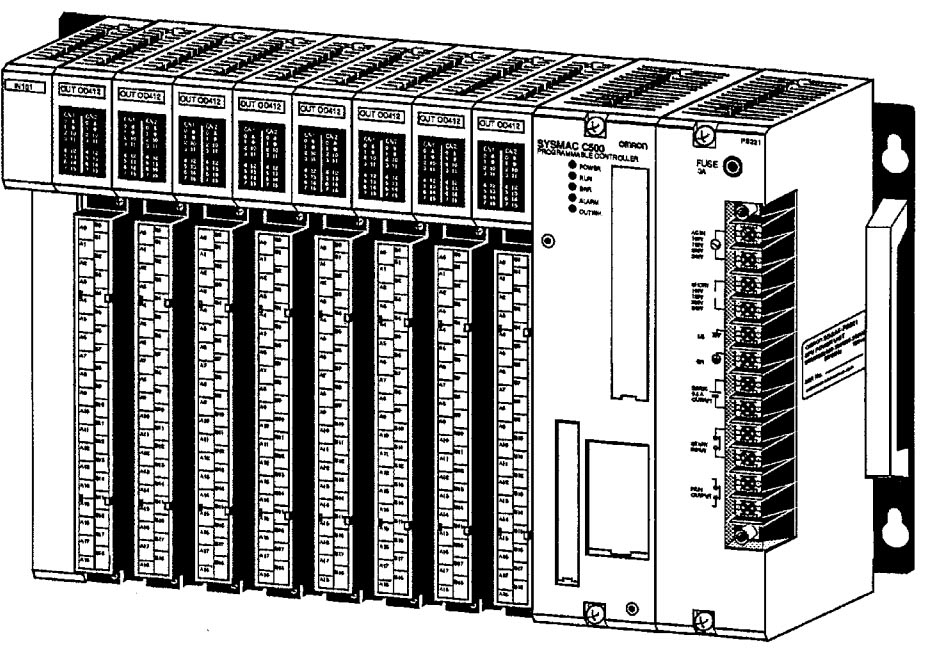
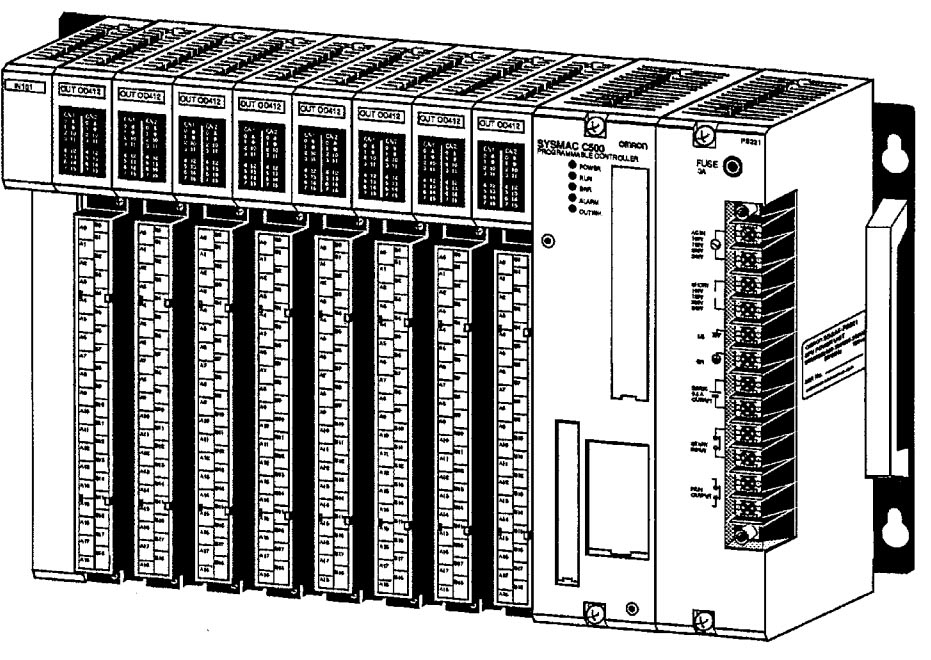
资料介绍
CPU单元成双:不可成双。
输入输出点数:1280点。
扩展装置的数量:多3个。
用户程序容量:30K步。
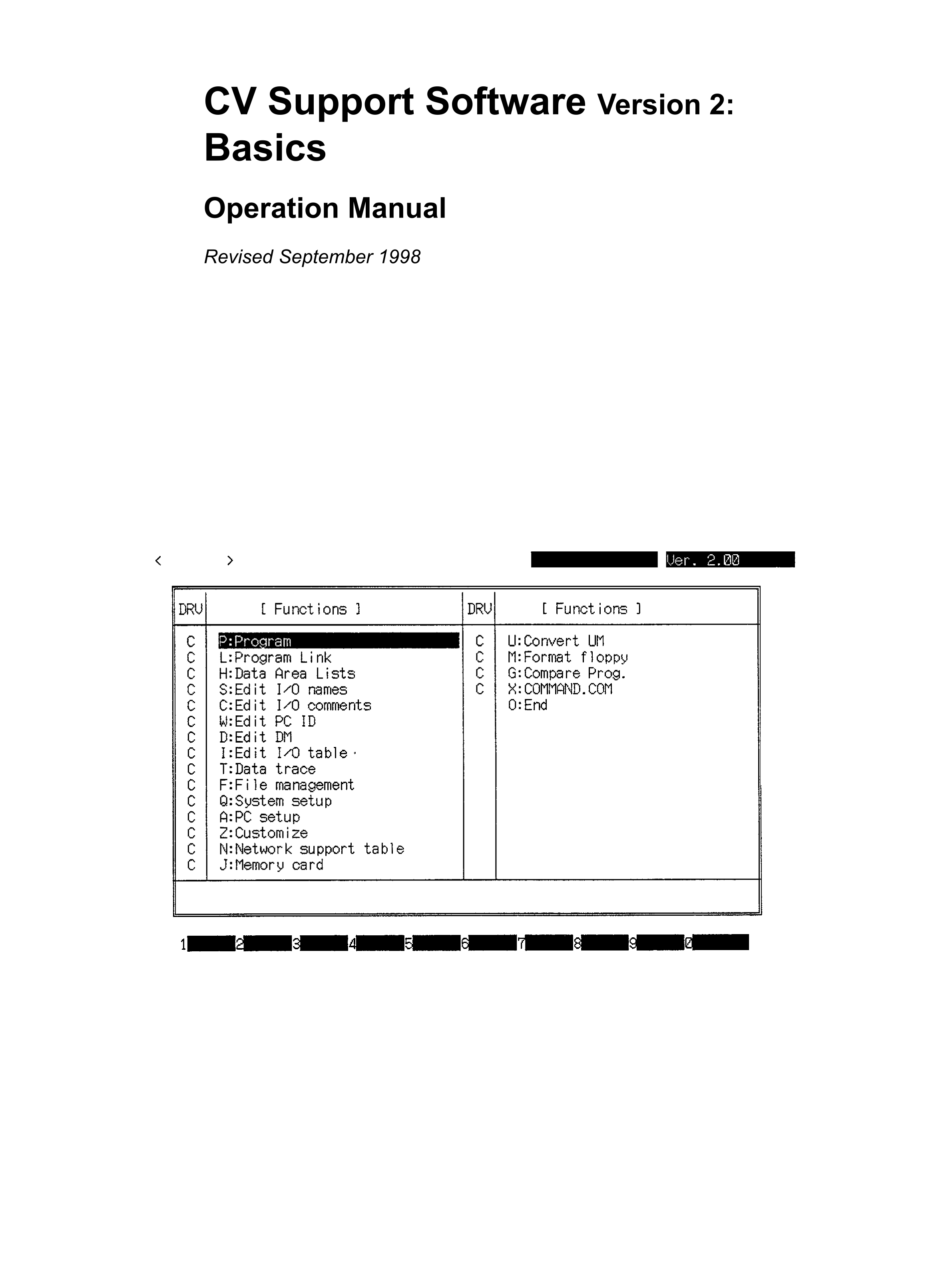
数据存储器:64K字。DM:32K字;EM:32K字×1个存储库CV500-CN22A支持软件Online操作手册。
回路控制功能:是,当安装回路控制板时。
可以成双配备Ethernet,
也可成双配备Controller Link,
两者在FA应用中均有可靠的性能记录。
此外,低等级I/O可用于多种网络,
包括DeviceNet、CompoNet以及MECHATROLINK-II运动控制器网络。
DeviceNet和CompoNet均为开放网络,与CS1系列一并具有可靠的性能记录。控制MECHATROLINK-II同步通信执行的指令CV500-CN22A支持软件Online操作手册。
梯形图编程的直接操作。
控制模式:位置控制、速度控制或扭矩控制。
轴数:4轴。
通过灵活接线实现单电缆连接。
有了MECHATROLINK-II,连接伺服驱动器是一件很容易的事。
只使用单根电缆 ( 2芯屏蔽双绞线电缆)。
接线减少,总电缆长度为50m( 16轴为30m),
可以构建可轻松扩展的系统,
这样使用几个轴时的效率与以后使用多达16个轴时的效率一样高。
使用MA功能进行多轴链接操作。
对线性插补新增的插补轴停止模式设置和轴间容许偏移设置使得轴之间的链接操作更容易设置。
通过简易操作、减少接线、批设置和批管理降低TCO。
通过一个支持MECHATROLINK-II的位置控制单元,
定位CV500-CN22A支持软件Online操作手册。
紧凑型机身是满足降低多轴控制设备大小需求的佳之选。
为构建系统提供更多自由。
启动和维护时间减少。
可以从PLC设置伺服参数。
这表明从一个位置就可以进行设置和调整,而不需要分别连接到每个伺服驱动器。输出方式: C500-NC113与伺服驱动器连接,通过。
SYSMAC传送位置数据, 进行定位。
运动控制(MC)是自动化的一个分支,
它使用通称为伺服机构的一些设备如液压泵,
线性执行机或者是电机来控制机器的位置或速度。
运动控制在机器人和数控机床的领域内的应用要比在专用机器中的应用更复杂,
因为后者运动形式更简单,通常被称为通用运动控制(GMC)。
运动控制被广泛应用在包装、印刷、纺织和装配工业中。欧姆龙的系列位置和运动控制器已在mc402e的加入大大增强。
mc402e被设计作为一个PLC模块和多达四个伺服驱动轴提供多轴复杂的运动控制。
为高水平控制而设计的。
变革生产现场的「情报化」、「标准化」
为了适应消费者多样化的需要,
要求生产不同的品种、数量,缩短开发周期、降低成本等。
制造业正面对着十分严唆的形势。
因而在生产上愈发要求提率,机动灵活。
从而,情报化_、标准化成为当务之急。
为实现此目标,各销售部门配置的不同网络、专为用户特定编制的软件工具的使用环境力求统一。
适应多通道控制的元器件也正日益步入商品化阶段。
协力造就能市场速度的生产现场。
为了构构筑用户及销售部门更方便的体系CV500-CN22A手册。
欧姆龙积极推进现场情报化与标准化。
由wwindows版梯形程序作为windows环境中的工具统一CV500-CN22A手册。
除适应以太网外,对按照DeviceNet/D,必须提供通信协议宏的功能等。
由于这种环境的齐备,才实现了一呼即出、迅速顺应市场变化的生产环境。
 产品名称:PLC
产品名称:PLC