资料介绍
控制输出接口:EtherCAT通信执行的控制指令。
定位功能:存储操作、梯形图编程的直接操作。
轴数:2轴。
已分配的单元数编号:1。
电流消耗(A)5V:0.46CP1E-E10DT-D用户手册。
快速定位操作:使用PLC启动指令花费0.15~0.4ms(以上)来启动伺服操作。
支持带有对编码器的伺服电机。
配备EtherCAT接口的CJ系列位置控制单元。
EtherCAT非凡的控制性能和简单的操作提高了生产效率。
传送速度100Mbps的EtherCAT通信实现快速且地位置控制。
本位置控制单元提供了大量位置控制功能。
EtherCAT是Beckhoff Automation GmbH的注册商标。
快速定位操作:使用PLC启动指令花费0.15~0.4ms(以上)来启动伺服操作CP1E-E10DT-D用户手册。
支持带有对编码器的伺服电机。
线性插补期间轴之间的偏移。
广泛的定位操作。
随附存储操作功能。
带有脉冲串类型位置控制单元的公用控制接口(CJ1W-NC@@4)。
EtherCAT的快速通信 (短250s的通信周期)。
除了伺服控制外,可以连接变频器、视觉传感器以及支持EtherCAT的其它I/O设备。
支持伺服电机速度控制和扭矩限制输出。控制轴数:1轴/单元。
位置精据容量:20/轴。
使用自动梯形或S曲线加速或减速进行定位。
1,2或4轴可选,伺服马达或步进马达可组合使用。
可直接在CPU单元中规定操作,建立简单的定位系统。
S和特殊的性能使控制单轴或双轴变得容易CP1E-E10DT-D用户手册。
用单轴独立控制和双轴线性插补,可以同时控制双轴。
在定位操作停止时,位置或速度数据可以修改或从PC传送给NC211。
即使正在进行定位操作,利用速度系数,也可以改变速度。
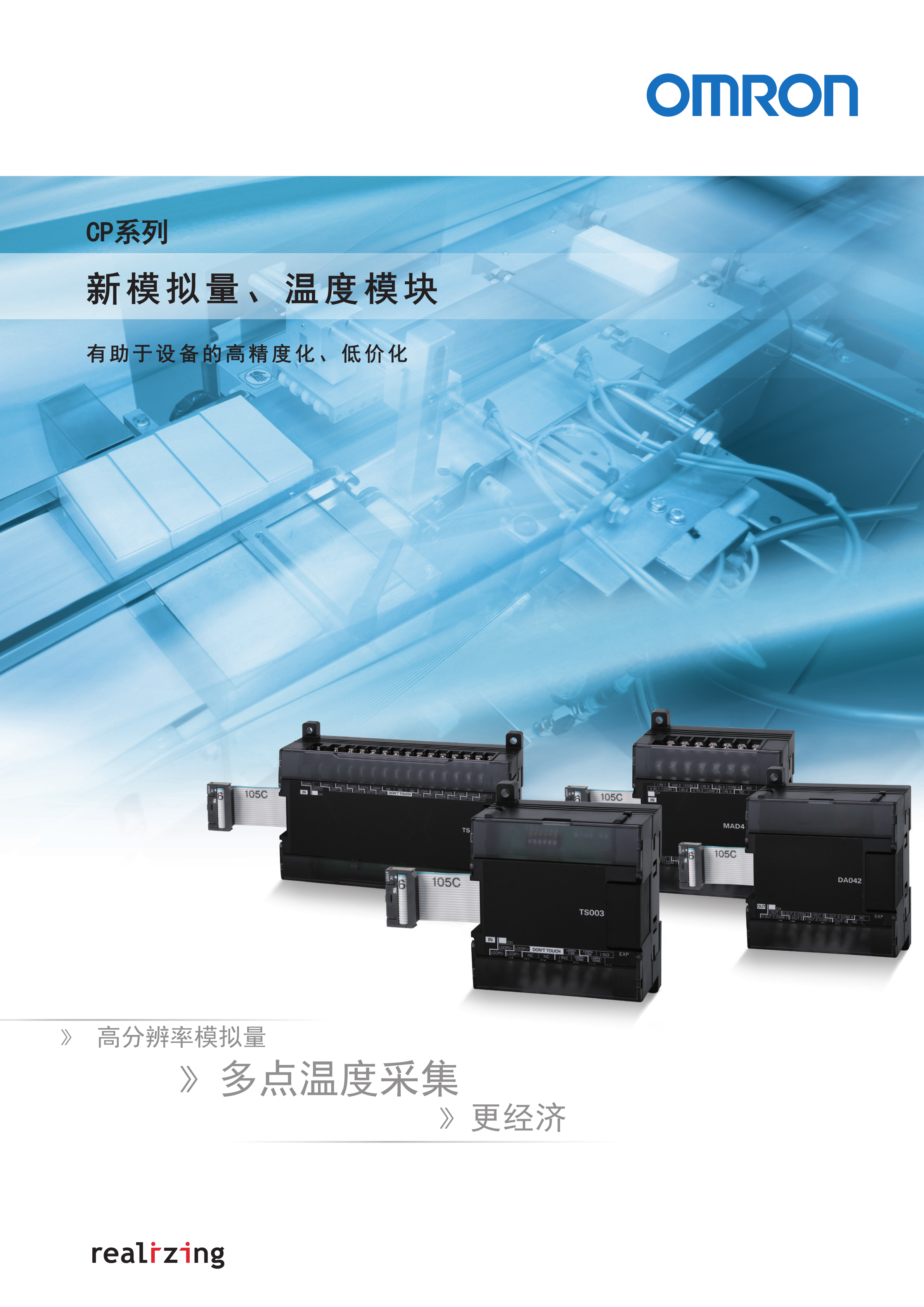
双轴上可设置多达53个位置。输入输出点数:输入1点,输出1点。
输入输出信号范围:1-5V、4-20mA。
分辨率:1/4096。
取入模拟输信号,对各种控制器,进行适宜的PID控制。
PID调节是一般闭环控制系统中用得较多的调节方法。
大中型PLC都有PID模块,目前许多小型PLC控制器也具有此功能模块。
PID处理一般是运行专用的PID子程序。
过程控制在冶金、化工、热处理、锅炉控制等场合有非常广泛的应用。CP1E-E10DT-D手册。电压:DC24V。
操作电压范围:DC20-28V。
输出容量:30WW DC5V:6ACP1E-E10DT-D手册。
电源设置:无。
CQM1H的左端盖是电源单元的一部分。
交流电源需要100-240V交流电源输入。
在选择电源单元时,详细情况参考CQM1H操作手册。
两种型号有24V直流电压输出。
 产品名称:CPU单元
产品名称:CPU单元
_inst-4074765-0e_jpg/cpseries(safetyprecautions)_inst-4074765-0e_1.jpg)