主营:欧姆龙,三菱,安川,Pro-face
主营:欧姆龙,三菱,安川,Pro-face
在日常生活中,各种形状(如圆形、椭圆形、方形等)的玻璃瓶,如玻璃酒瓶、化妆瓶、饮料瓶等被广泛应用。瓶身上的精美图文,既作为产品的标识,也带给了人们美的享受。玻璃瓶丝网印刷机,就是一种将各种精美图文印刷于玻璃瓶瓶身的机械。
1 机械结构概述
玻璃瓶丝网印刷机主要由入瓶输送带、理瓶机构、夹放瓶机构、印刷机构和出瓶输送带几部分组成,包含理瓶轴、横移轴、旋转轴、上下轴、刮板轴和丝网轴共6轴。机械外形如图1所示。
①-入瓶输送带 ②-理瓶机构
③-夹放瓶机构 ④-印刷机构
⑤-出瓶输送带
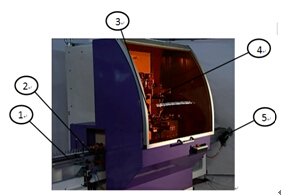
图1 玻璃瓶丝网印刷机外形结构
2 设备动作要求介绍
2.1设备工作过程
“入瓶输送带”将上游来的玻璃瓶送入“理瓶机构”。“理瓶机构”可根据玻璃瓶的形状和大小,更换相应的夹具。
“理瓶机构”用机器视觉对送来的玻璃瓶进行定位,保证“夹放瓶机构”夹取的瓶每次能在同一角度被送入“印刷机构”的旋转轴夹具。
“印刷机构”以旋转轴作为主轴带动玻璃瓶旋转,上下轴、刮板轴和丝网轴作为从轴与主轴保持凸轮关系,共同完成瓶身图文的印刷。
印刷完毕的玻璃瓶再由“夹放瓶机构”放入“出瓶输出带”,完成整个产品的加工。
2.2玻璃瓶外廓位置扫描
印刷圆瓶时,由于瓶径固定,只需旋转轴与丝网轴相对运动,刮板轴和上下轴保持不动即能完成印刷,相对容易。
印刷方瓶时,也只需根据方瓶的长、宽尺寸和要印刷的面数,就能确定旋转轴与上下轴、刮板轴和丝网轴所应有的运动关系。
而椭圆瓶形状较复杂,不易直接计算,所以首次印刷时,需对玻璃瓶的外廓进行位置扫描,再以这些测取的数据来构建印刷过程中所需的主从轴的电子凸轮关系。其过程如下:
扫描前,先拆掉丝网和刮板,在其相当的位置装上水平光电开关和垂直方向的距离传感器。光电开关产生的水平光束相当于丝网位置,在被物体阻隔时输出信号;距离传感器产生的垂直光束相当于刮板,其功能为在指定距离上(如图2中尺寸a所示)检测到有物体时输出信号。
当椭圆形玻璃瓶在旋转轴上安装好,未作旋转时(顺旋0度),如图2所示,玻璃瓶位于A位置,距离传感器位于C位置。
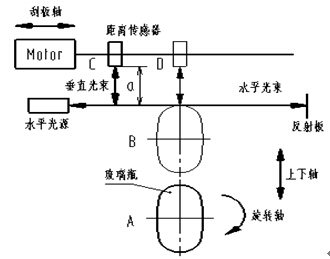
图2 玻璃瓶顺旋0度的外廓位置扫描
扫描开始,上下轴首先带动玻璃瓶上移至水平光束感应(如图2中B位置),此感应信号被控制器检测并作为上下轴位置的抓取信号;然后,刮板轴带动距离传感器右移至垂直光束在a距离上有物体感应(如图2中D位置),此感应信号被控制器检测并作为刮板轴位置的抓取信号。
抓取到这些位置数据后,上下轴再带动玻璃瓶返回A位置,距离传感器也返回C位置。然后旋转轴将玻璃瓶顺旋10度后,再重复上述过程。
按此方法,每次将旋转轴玻璃瓶顺转10度,就扫描、抓取、存储一次上下轴和刮板轴的位置。再使用这些数据,就能建立旋转轴与上下轴、刮板轴的凸轮曲线。一般情况下,因为玻璃瓶的外形对称,所以只需扫描到90度就能建立主轴旋转360度的凸轮曲线。
3 系统配置
根据上述机械结构与动作要求,确定控制系统架构如图3。
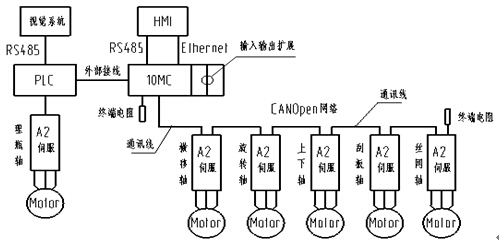
图3 控制系统架构框图
根据系统架构需求,确定采用如下表1所示的产品型号及数量。该架构中,HMI与DVP10MC11T的通讯连线有2条。一条为RS485,一条为Ethernet,分别与DVP10MC11T的PLC模块和MC模块连接。
表1控制系统产品型号列表
名称
型号
数量
备注
触摸屏(HMI)
DOP-B07E515
1
7寸以太网型触摸屏
运动控制主机
DVP10MC11T
1
16轴总线型运动控制器
输入扩展
DVP16SM11N
2
16DI扩展
输出扩展
DVP16SN11T
2
16DO扩展(NPN晶体管)
PLC主机
DVP12SA211T
1
12点主机,8DI/4DO(NPN晶体管)
伺服电机
ECMA-C20604ES
5
理瓶轴、横移轴、旋转轴、刮板轴、丝网轴用400W低惯量伺服
ECMA-C20807ES
1
上下轴用750W低惯量伺服
伺服驱动器
ASD-B2-0421-B
5
与ECMA-C20604ES配套
ASD-B2-0721-B
1
与ECMA-C20807ES配套
通讯线
TAP-CB10
5
1m电缆,含RJ-65接头
终端电阻
TAP-TR01
2
120Ω终端电阻
视觉系统
欧姆龙
1
客户自配
4 程序实现
4.1 触摸屏画面编辑与操作
“印刷产品选择画面”中,右侧按钮用于选择需印刷玻璃瓶的形状,可选择“椭圆”、“圆”和“方形”,左侧按钮用于进入相应形状产品的设置画面。以印刷椭圆型产品为例,图4为“椭圆型产品设置画面”。
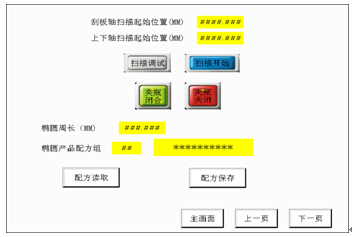
图4 椭圆产品设置画面
在该画面中设置好相关参数,然后按下“扫描开始”按钮,就能对椭圆型玻璃瓶外廓位置进行扫描。点击“下一页”,可对扫描到的数据进行查看。
扫描完成后,再按 “凸轮写入”按钮,便可将扫描到的数据进行运算和写入电子凸轮表。
4.2程序编写
DVP10MC11T的PLC模块部分主要用于接受外部的传感器、开关、按钮等信号和送出输送带、气缸等的控制信号,并监视和触发MC模块的运动控制,承担整个生产过程的逻辑控制任务。
而MC模块主要用于完成印刷各轴的运动控制,下面主要对MC模块的电子凸轮建立和运作部分进行介绍。
首先在CANpenBuilder软件中,作运动控制网络组态如图5。
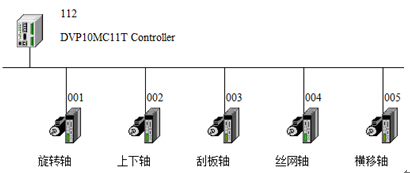
图5 10MC运动控制网络组态
完成后,规划运动控制程序,其中包括:伺服ON及寸动,归原点及点动,配方功能,自动丝印、数据采集与凸轮建立、各轴状态及数据交换、椭圆相关计算、自学习调试、圆相关计算及凸轮、横移轴及其他。
数据采集和凸轮建立:使用MC_MoveAbsolute和MC_MoveVelocity让2、3轴按“玻璃瓶外廓位置扫描”要求动作,检测到感应信号I1、I2后,读取2、3轴位置。再使用Offset_R指令(浮点数变址寄存器指令)将读取到的Position数据变址送入指定的寄存器区块。
DVP10MC11T提供了2048个电子凸轮关键点,每点有4个寄存器进行设置。如第1个电子凸轮关键点的4个寄存器编号和通讯地址如图6所示。
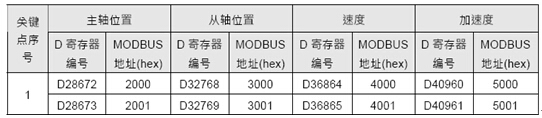
图6 电子凸轮第1个关键点的寄存器编号和通讯地址
这样便可通过给关键点的寄存器赋值来动态修改一个已经建立且确定了凸轮点数的CAM表的凸轮曲线。而使用DMC_CamSet指令可激活修改后的凸轮曲线。按此方法,作出的椭圆型玻璃瓶印刷的上下轴、刮板轴的凸轮曲线如图7、8所示。
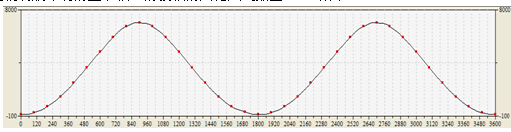
图7 椭圆瓶印刷的上下轴凸轮曲线
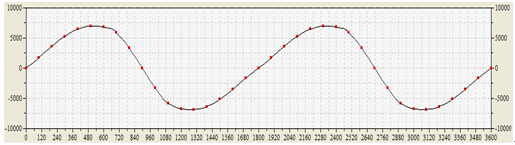
图8 椭圆瓶印刷的刮板轴凸轮曲线
而丝网轴的凸轮曲线是根据触摸屏上“椭圆周长”设置,对已建好的丝网轴凸轮曲线作缩放比例完成的。其返回再由定位指令完成。
自动丝印:按下启动按钮,PLC模块在玻璃瓶定位完成和夹瓶放入旋转轴后,便启动MC模块的凸轮啮合。这主要是对MC_CamTableSelect、MC_CamIn、MC_CamOut指令进行使用。
其中MC_CamTableSelect指令用于选择凸轮表,本项目中建立的CAM表种类包括:上下轴、刮刀轴、丝网轴、圆、四角瓶上下轴、丝网新、放大丝网凸轮、四边形刮刀轴、四边形丝网轴。
5 使用效果
目前该方案的应用效果已经得到客户认同,开始陆续出货。该方案除了在玻璃瓶丝网印刷中应用,还可扩展到陶瓷瓶、塑料瓶等的丝网印刷及烫金机等设备的应用。
作者简介:
谭坤鹏,男,生于1985年,毕业于重庆大学,机械电子工程。现任中达电通股份有限公司工业控制系统产品开发处应用工程师,从事PLC、HMI、工业电源、以太网交换机等产品的工程应用和技术支持。
 阳光东尚S5地块智能照明控制系统的设计和应用
1 概述 ASL1000智能照明监控系统,采用与KNX兼容的Acrel-Bus总线组网方式,通过IP网关接入智能照明控制系统,实现定时控制、感应控制、早晚高峰全开等各种场景,使照明系统按照预先设定的各
阳光东尚S5地块智能照明控制系统的设计和应用
1 概述 ASL1000智能照明监控系统,采用与KNX兼容的Acrel-Bus总线组网方式,通过IP网关接入智能照明控制系统,实现定时控制、感应控制、早晚高峰全开等各种场景,使照明系统按照预先设定的各
 研华港口机械控制系统
项目介绍 由于受到全球经济大环境的影响,港口机械的销售额每况愈下,众多大型设备厂的经营也捉襟见肘,但随着经济的日益复苏,一些中小型企业在此中找到了商机,研华在行业中的经验可以轻而易举的帮助此类
研华港口机械控制系统
项目介绍 由于受到全球经济大环境的影响,港口机械的销售额每况愈下,众多大型设备厂的经营也捉襟见肘,但随着经济的日益复苏,一些中小型企业在此中找到了商机,研华在行业中的经验可以轻而易举的帮助此类
 台达20PM运动控制器在高速绕线机上的应用
基本介绍: 全自动无骨架系列高速绕线机,可以绕制不同规格的空心线圈,如:传动线圈,扬声器线圈,天线线圈以及各种无骨架通用线圈。设备具有性能可靠,高速高效率,自动化程度高,适合于线圈的大批量生产。设
台达20PM运动控制器在高速绕线机上的应用
基本介绍: 全自动无骨架系列高速绕线机,可以绕制不同规格的空心线圈,如:传动线圈,扬声器线圈,天线线圈以及各种无骨架通用线圈。设备具有性能可靠,高速高效率,自动化程度高,适合于线圈的大批量生产。设
 高速数据通讯和动态运动控制是高效完成热喷涂工艺的保障
热喷涂是一种表面处理技术,即将熔融或加热后的材料喷涂到表面上。为了提高喷涂质量,四川大学自主设计 出一套九轴联动热喷涂系统,在这个系统中,三轴转台与六轴机械手同时优化运行。该系统利用 Beckho
高速数据通讯和动态运动控制是高效完成热喷涂工艺的保障
热喷涂是一种表面处理技术,即将熔融或加热后的材料喷涂到表面上。为了提高喷涂质量,四川大学自主设计 出一套九轴联动热喷涂系统,在这个系统中,三轴转台与六轴机械手同时优化运行。该系统利用 Beckho
 台达多轴运动控制卡在自动PCB印刷机上的应用
摘要:本文主要介绍了PCB印刷机作为SMT(表面贴装技术)关键设备的主要工作原理和流程。采用台达多轴运动控制卡提高了系统响应的实时性,并且提高了自动PCB印刷机系统的定位精度和响应速度,使得自动P
台达多轴运动控制卡在自动PCB印刷机上的应用
摘要:本文主要介绍了PCB印刷机作为SMT(表面贴装技术)关键设备的主要工作原理和流程。采用台达多轴运动控制卡提高了系统响应的实时性,并且提高了自动PCB印刷机系统的定位精度和响应速度,使得自动P
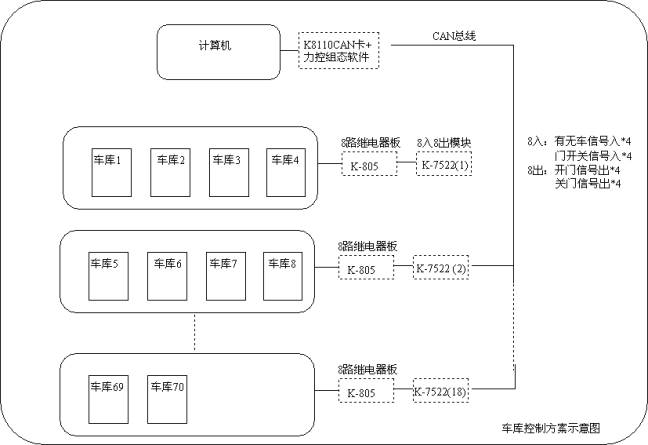 CAN总线K75系列产品在车库控制中的应用
机动车车库管理控制系统 一.使用需求 1.车库内共有70个车位,每个车位入口设门, 应有控制开门,关门的控制信号。同时,还应检测每个车位是否有车,车位门状态是打开还是关闭。 2.设置一个集
CAN总线K75系列产品在车库控制中的应用
机动车车库管理控制系统 一.使用需求 1.车库内共有70个车位,每个车位入口设门, 应有控制开门,关门的控制信号。同时,还应检测每个车位是否有车,车位门状态是打开还是关闭。 2.设置一个集
 基于 PC 的控制技术的灵活性可以最大限度地缩短开发时间
[2020年5月13日,中国] 随着国内新冠肺炎疫情的发展,口罩等医疗物资的需求大幅增加。与布尔科技合作的设备厂家逐步投产口罩生产设备,成为国内抗击新冠疫情期间第一批生产 N95 口罩机的企业。由
基于 PC 的控制技术的灵活性可以最大限度地缩短开发时间
[2020年5月13日,中国] 随着国内新冠肺炎疫情的发展,口罩等医疗物资的需求大幅增加。与布尔科技合作的设备厂家逐步投产口罩生产设备,成为国内抗击新冠疫情期间第一批生产 N95 口罩机的企业。由
 复杂的楼宇自动化需要 200 多个控制箱和 1200 个 I/O 总线端子模块
根据中国国家三甲医院的配套标准,医院必须配备节能、降耗的设施。要达到这一标准,需要采用一整套的楼宇自动化系统来对风机、水泵、灯光等进行控制。云南阜外医院采用了先进的基于 PC 的控制系统,整合了
复杂的楼宇自动化需要 200 多个控制箱和 1200 个 I/O 总线端子模块
根据中国国家三甲医院的配套标准,医院必须配备节能、降耗的设施。要达到这一标准,需要采用一整套的楼宇自动化系统来对风机、水泵、灯光等进行控制。云南阜外医院采用了先进的基于 PC 的控制系统,整合了
专注服务于工控领域 7×8小时售后支持
全方位的技术支持 因为专注所以专业