主营:欧姆龙,三菱,安川,Pro-face
主营:欧姆龙,三菱,安川,Pro-face
人机互动的接触
传统的工业机器人,通常使用安全监控停止以及速度分离监控等手段,从时间和空间两个维度,将操作人员和机器人进行安全隔离。
如果在同一时间和空间内,操作人员与机器人依然具有互动的需求,便可能产生直接的物理接触。
这些物理接触,特别是其中的非预期接触,例如碰撞、冲击、挤压等等,都可能对操作人员产生直接的伤害。

人机互动时可能产生物理接触
物理接触类型
机器人系统的运动部件与人体区域之间可能的接触有两种不同的类型。
- 准静态接触:一般属于夹紧或挤压情况。在这种情况下,机器人系统会对受困身体部位施加一段时间的压力。
- 瞬时接触:这也被称为“动态碰撞”。人的身体部位受到机器人系统的运动部件的冲击,这种类型的实际接触时间短,不会造成身体部位被夹住或俘获。
瞬时接触取决于机器人惯性,人体部位的惯性,以及两者的相对速度的组合。
人机的物理接触
压强与力量限制
人机直接互动中物理接触的安全保护,在ISO/TS 15066中有了全新的定义。
现在通过机器人本质安全的手段,基于安全相关的控制系统,如果能将机器人系统的压强与力量控制在风险评估期间确定的允许范围内,便能实现风险的降低。
ISO/TS 15066基于生物力学的研究和测试结果,根据人体不同的部位,定义了准静态接触和瞬态接触的阈值,提供了机器人制造商与集成商,尤其是协作型机器人供应商一个安全指导纲领。
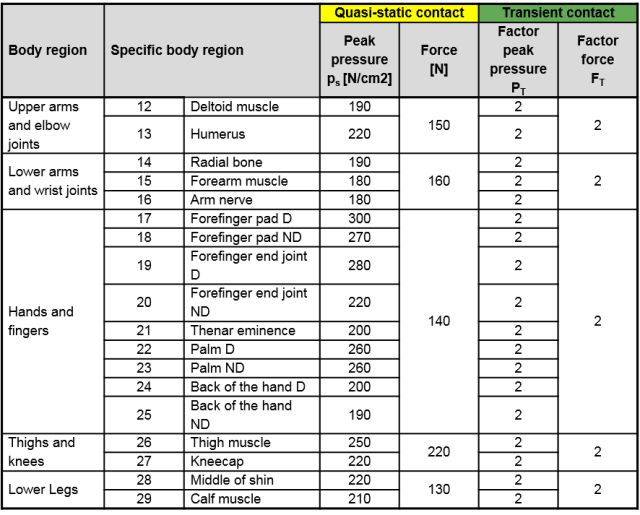
压强与力量限制表
皮尔磁依照ISO/TS 15066标准的身体区域模型,开发了适用于协作型机器人的碰撞测量系统PROBms。
PROBms主要用在验证人机协作时的碰撞极限值,并记录会导致发生潜在碰撞的力和压强:
- 力的测量
碰撞测量装置包括弹簧和传感器,用以测量施加在人体上的力。
九只不同的弹簧分别具有不同的弹性系数,可在力测量中用于模拟各个身体区域。
- 压强的测量
压敏感应纸用于测量局部压强并将其同相关标准中规定的极限值进行比较。
您可使用皮尔磁专属软件工具对力测量值进行评估和数字化处理,并生成报告,简单便捷。
特性一览
1、对压强与力量的测量符合行业标准
2、产品小巧轻便,使用简单
3、用于简化评估、可视化和记录的软件
4、长效使用寿命
5、可根据环境条件灵活调整
6、标准化测量方法
 液化空气天津滨海有限公司安全用电管理云平台
本项目为天津用电安全管理系统建设项目,安全用电管理云平台通过物联网技术对电气引发火灾的主要因素(线缆温度、电流、电压和漏电流)进行不间断的数据跟踪与统计分析,实时发现电气线路和用电设备存在的安全隐患(
液化空气天津滨海有限公司安全用电管理云平台
本项目为天津用电安全管理系统建设项目,安全用电管理云平台通过物联网技术对电气引发火灾的主要因素(线缆温度、电流、电压和漏电流)进行不间断的数据跟踪与统计分析,实时发现电气线路和用电设备存在的安全隐患(
 测氢专用型压力变送器典型应用案例
一、产品介绍:“氢脆”和“氢透”现象在测量氢气压力方面一直困扰着工程技术界,氢气一旦泄漏可能产生不堪设想的后果。目前市场上的压力变送器绝大多数都不能直接用于测量氢气的压力,因为这些产品所用的材料都不
测氢专用型压力变送器典型应用案例
一、产品介绍:“氢脆”和“氢透”现象在测量氢气压力方面一直困扰着工程技术界,氢气一旦泄漏可能产生不堪设想的后果。目前市场上的压力变送器绝大多数都不能直接用于测量氢气的压力,因为这些产品所用的材料都不
 【视觉龙】龙睿智能相机在光伏行业的应用—视觉排版机
-光伏视觉排版机- 排版机是对光伏组件传输,排版定位的设备。通过视觉定位将串焊机焊好的电池串,按工艺尺寸要求和排版方向顺序自动排版组成电池串阵列。本方案采用龙睿智能相机的专用型与机器人或模组配合,通
【视觉龙】龙睿智能相机在光伏行业的应用—视觉排版机
-光伏视觉排版机- 排版机是对光伏组件传输,排版定位的设备。通过视觉定位将串焊机焊好的电池串,按工艺尺寸要求和排版方向顺序自动排版组成电池串阵列。本方案采用龙睿智能相机的专用型与机器人或模组配合,通
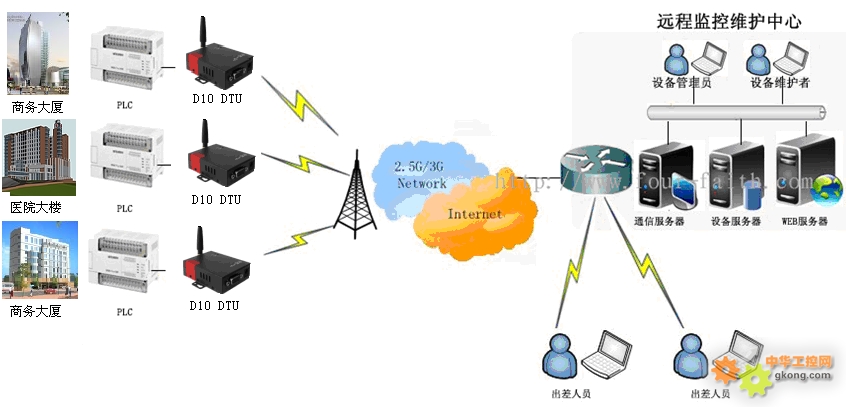 德传DTU在中央空调远程维护系统中的应用
早期的中央空调控制器多为就地式专用控制器和DDC 控制器,它们具有控制功能简单、不易联网及信息集成度不高等缺点。可编程控制器(PLC)在工业控制方面的应用价值日趋明显,具有功能强大、使用可靠、维修简
德传DTU在中央空调远程维护系统中的应用
早期的中央空调控制器多为就地式专用控制器和DDC 控制器,它们具有控制功能简单、不易联网及信息集成度不高等缺点。可编程控制器(PLC)在工业控制方面的应用价值日趋明显,具有功能强大、使用可靠、维修简
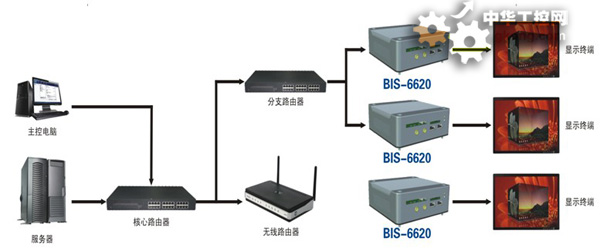 华北工控BIS-6620在地铁信息发布系统中的应用
一、项目背景 为了缓解越来越紧张的交通压力,地铁成为现代化城市的基础设施之一。城市地铁项目涉及到多种系统以及复杂的技术,在保障地铁安全运行的前提下,需要逐步完善相关配套设施,从而为乘客提供人性
华北工控BIS-6620在地铁信息发布系统中的应用
一、项目背景 为了缓解越来越紧张的交通压力,地铁成为现代化城市的基础设施之一。城市地铁项目涉及到多种系统以及复杂的技术,在保障地铁安全运行的前提下,需要逐步完善相关配套设施,从而为乘客提供人性
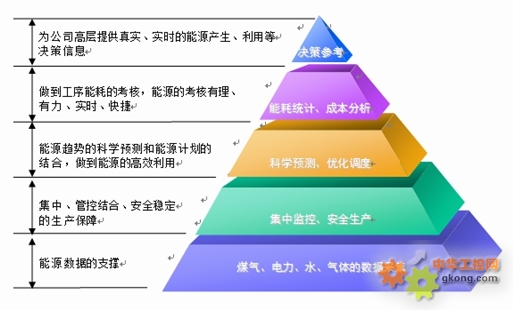 紫金桥实时数据库应用于炭素企业能源管理系统
1.项目概述建立企业能源管理中心系统是炭素企业节能减排的重要措施。能源管理中心系统利用自动控制技术、网络技术和先进的数字化计量仪表,来获取生产过程的重要参数和相关能源数据,多年实践经验证明,该技术
紫金桥实时数据库应用于炭素企业能源管理系统
1.项目概述建立企业能源管理中心系统是炭素企业节能减排的重要措施。能源管理中心系统利用自动控制技术、网络技术和先进的数字化计量仪表,来获取生产过程的重要参数和相关能源数据,多年实践经验证明,该技术
 台达电能质量产品在铜冶炼中的应用
1项目背景及现状某冶炼厂为国际知名铜冶炼企业,位于广东省某市的分厂以再生铜冶炼为主,由于主要工艺过程为除杂、电解及精炼,需要用到中压整流变压器,且各生产车间有大量的变频器和风机、水泵的使用,造成
台达电能质量产品在铜冶炼中的应用
1项目背景及现状某冶炼厂为国际知名铜冶炼企业,位于广东省某市的分厂以再生铜冶炼为主,由于主要工艺过程为除杂、电解及精炼,需要用到中压整流变压器,且各生产车间有大量的变频器和风机、水泵的使用,造成
 Acrel-6000电气火灾监控系统在长春苏宁电器中的应用
赵斌安科瑞电气股份有限公司上海嘉定摘要:安科瑞剩余电流式电气火灾监控系统通过ARCM剩余电流式电气火灾监控装置或数字型剩余电流互感器,对商场、宾馆、机场、银行、医院、厂房等建筑低压配电系统进行电气火灾
Acrel-6000电气火灾监控系统在长春苏宁电器中的应用
赵斌安科瑞电气股份有限公司上海嘉定摘要:安科瑞剩余电流式电气火灾监控系统通过ARCM剩余电流式电气火灾监控装置或数字型剩余电流互感器,对商场、宾馆、机场、银行、医院、厂房等建筑低压配电系统进行电气火灾
专注服务于工控领域 7×8小时售后支持
全方位的技术支持 因为专注所以专业