主营:欧姆龙,三菱,安川,Pro-face
主营:欧姆龙,三菱,安川,Pro-face
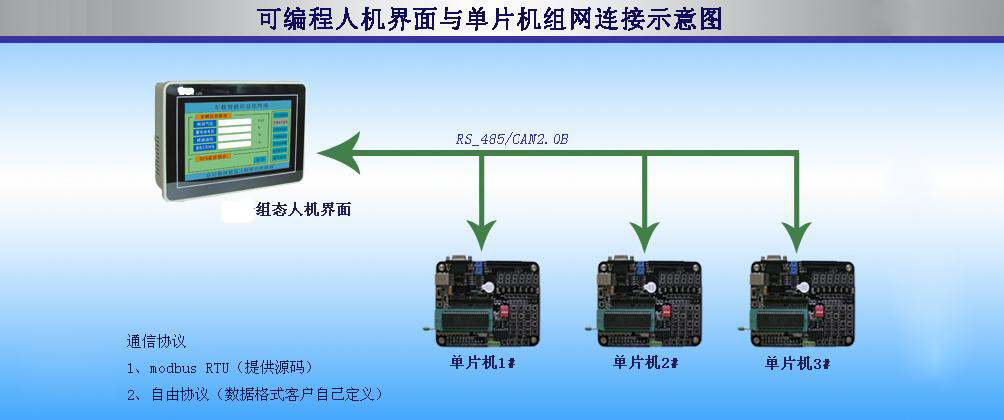
很多时候,工业控制或者产品设计方面受到PLC这种功能确定,扩展麻烦,成本昂贵等方面的制约因素,需要独立开发一种特殊功能,但是又需要连接触摸屏通讯,工程师在这个方面往往需要花费很大功夫,现在我要帮大家解决的问题就是 单片机与人机界面触摸屏通讯的最简单,最有效的 2种方法,其实就是分为2种通讯协议,即工业标准的 Modbus RTU协议和工程师自己定义的 自由协议。
本实例采用其中一款人机界面作为参考,由广州三青创工自动化科技有限公司提供技术支持和公布单片机源代码,加上公司的人机界面支持自由协议等等先天优势,开发工程方便快捷有效。
方案比较:
方案一 modbus—rtu协议:
优点:工业标准通讯协议,具有通用性,,传输数据量大
缺点:需要时间去了解协议的格式和以及按照规定编写通讯程序(我们提供MODBUS-RTU源代码,客户直接移植就可以,不必费心)
方案二 自由协议:
优点:数据格式客户自己定义,灵活多变,定制性强,可以模拟任何已知报文的通讯协议,单片机工程师比较容易接受,容易上手
缺点:传输数据量不大,通用性不强,移植不方便
工程师可以根据以上两种通讯协议的优缺点来选择理想的方案;
现在我们重点介绍工业触摸屏人机界面的自由通讯协议。
首先下载工业触摸屏人机界面的组态软件,下载安装好软件之后,新建一个工程文件,
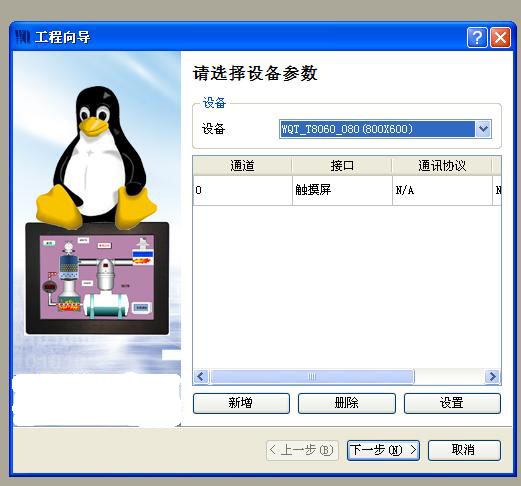
设备对应的是公司出产产品型号,通道是指设备代号,0是代表触摸屏本身,点击新增,出现如下设置:

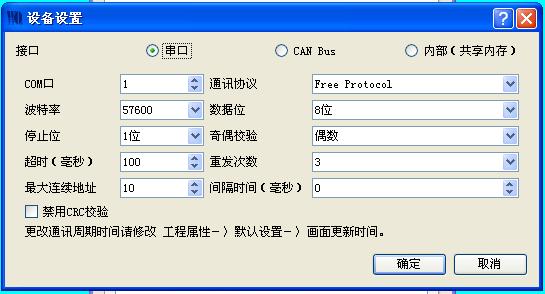
接口选择可以为串口,CAN Bus和内部(共享内存)三种,这边我们选择串口,因为人机界面有1-2个串口,这些串口既可以做RS232,又可以做RS485,根据客户工程需求接线,通讯协议对应的就是单片机工程师需要用的协议,其中有Modbus rtu协议,自由协议Free Protocol,当然还包括西门子200,台达PLC,欧姆龙,三菱等协议,这里我们选择COM1自由协议Free Protocol,通讯速率57600,数据位8,1位停止位,偶校验,如下:
点击确定进入用户工程师的信息填写栏:
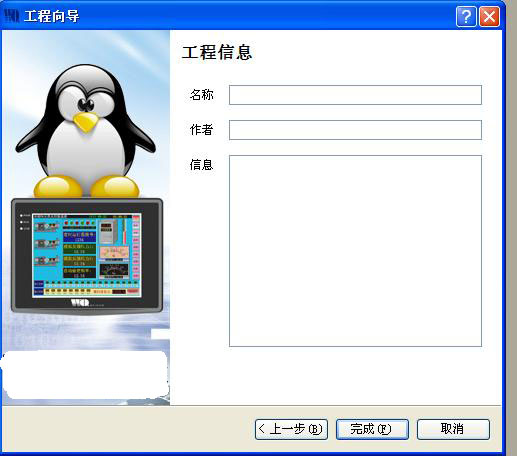
也可以直接点击完成进入画面编辑窗口:
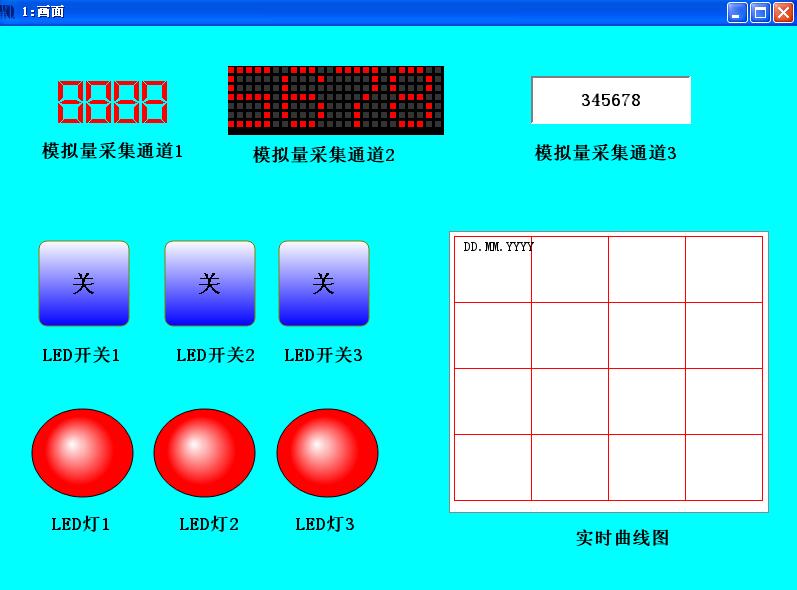
到这里,我们就可以像拼图游戏一样拼自己喜欢的界面了,这边,我做一个最简单的工程如下用位按钮开关控制单片机的LED灯,采集单片机的数据(AD采集)显示在组态软件的数码管(可以电脑串口连接单片机在线模拟,方便开发工程)
然后我们要把位按钮的属性绑定到人机界面的系统寄存器,然后再用人机界面内置的宏指令通讯函数output函数把寄存器数据传输给单片机,让单片机接收这个指令之后进行动作控制,方法实现如下:
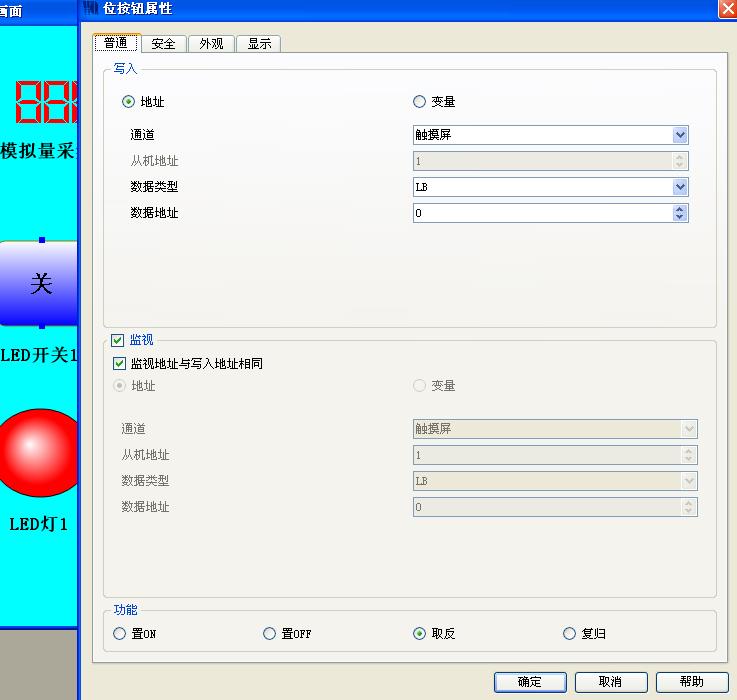
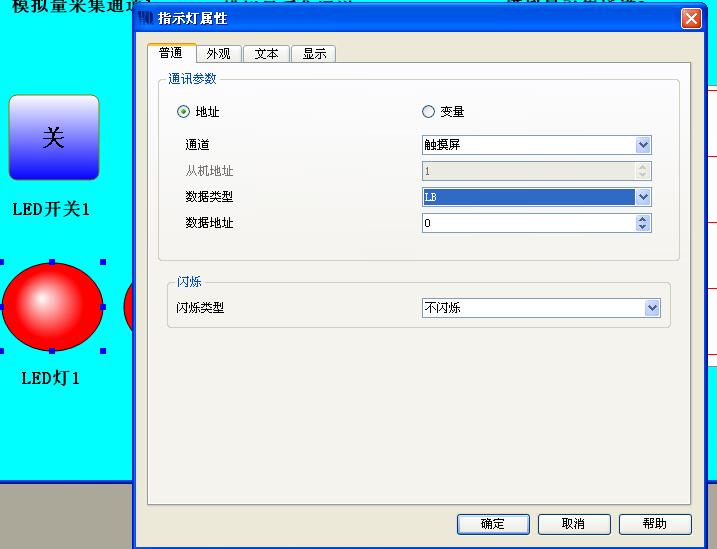
我们把位按钮1绑定到人机界面系统寄存器LB的第0个里面,再用一个LED指示灯观察按钮的状态(绑定系统寄存器LB0)
对于数码管显示,属性设置原来差不多,但是需要用input函数将从单片机采集的数据存储到人机界面系统寄存器,再通过宏指令函数映射显示出来,方法如下:

我们将通道一绑定到系统寄存器LD的第1个寄存器,LD是数据寄存器,LB是布尔量的位寄存器,注意两种寄存器的区别。
接下来我们要用到人机界面的组态软件内置的通讯函数,数学运算函数和其他函数了。由“设置”菜单那里进入到宏指令编辑器进入宏指令编辑:
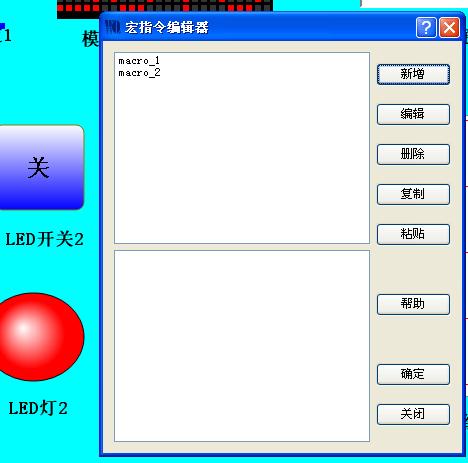
点击新增,我们写一个宏指令通讯函数,向单片机发送控制指令和接受数据:
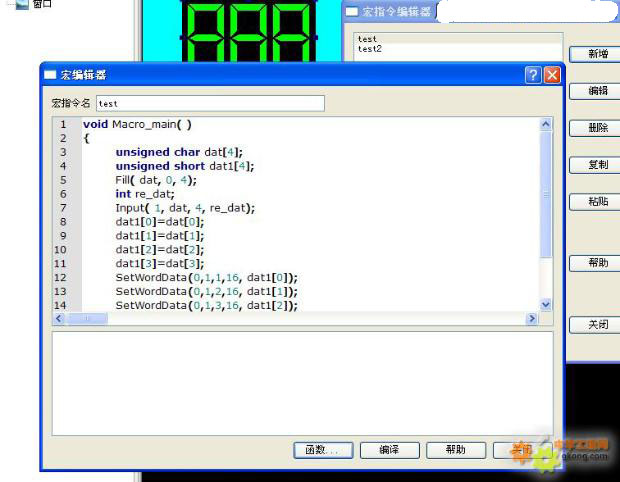
具体编程如下:
宏指令macro_1:
void Macro_main( )
{
unsigned char dat[4];
unsigned short dat1[4];
int re_dat;
Input( 1, dat, 4, re_dat);
/*如果不明白函数使用,可以点击函数向导按钮查找函数使用说明
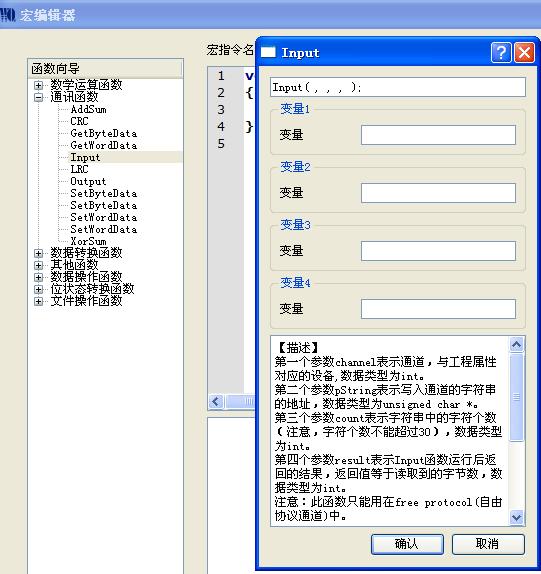
【描述】
第一个参数channel表示通道,如果通道为com1,则channel=1;如果通道为com2,则channel=2,数据类型为int。
第二个参数pString表示写入通道的字符串的地址,数据类型为unsigned char *。
第三个参数count表示字符串中的字符个数,数据类型为int。
第四个参数result表示Output函数运行后返回的结果,如果result大于0,则表示读写有效,数据类型为int。
注意:此函数只能用在freeprotocol(自由协议通道)中。
【用法】
Input(channel,pString,count,result);
【举例】
char srt[9];
int result;
Input(1,str[0],9,result);
*/
dat1[0]=dat[0];
dat1[1]=dat[1];
dat1[2]=dat[2];
dat1[3]=dat[3];
SetWordData(0,1,1,16, dat1[0]);
SetWordData(0,1,2,16, dat1[1]);
SetWordData(0,1,3,16, dat1[2]);
SetWordData(0,1,4,16, dat1[3]);
}
macro_2:用于发送指令到单片机进行控制,主要用到output函数
static unsigned char key[3];
void Macro_main( )
{
bool key_data[16];
int re_dat;
GetByteData(0, 1,0, 9, 0,key_data);
key[0] = key_data[7]<<7 | key_data[6]<<6 | key_data[5]<<5 | key_data[4]<<4 | key_data[3]<<3 | key_data[2]<<2 | key_data[1]<<1 | key_data[0];
//key[1]=key_data[15]<<7 | key_data[14]<<6 | key_data[13]<<5 | key_data[12]<<4 | key_data[11]<<3 | key_data[10]<<2 | key_data[9]<<1 | key_data[8];
key[1]=key_data[8];
Output( 1, key, 2, re_dat);
}
对应单片机下位机的编程,作为单片机开发者应该都知道如何编程了.
 基于 PC 的楼宇自动化系统在弗劳恩霍夫 IAO 虚拟工程中心的应用
新建的虚拟工程中心(ZVE)的设计与其内部进行的科研工作一样具有创新意义。灵活、全方位的楼宇自动化系统创造了无限的可能性,并能整体地节约能源。系统集成商 Herrmann GmbHCo. KG
基于 PC 的楼宇自动化系统在弗劳恩霍夫 IAO 虚拟工程中心的应用
新建的虚拟工程中心(ZVE)的设计与其内部进行的科研工作一样具有创新意义。灵活、全方位的楼宇自动化系统创造了无限的可能性,并能整体地节约能源。系统集成商 Herrmann GmbHCo. KG
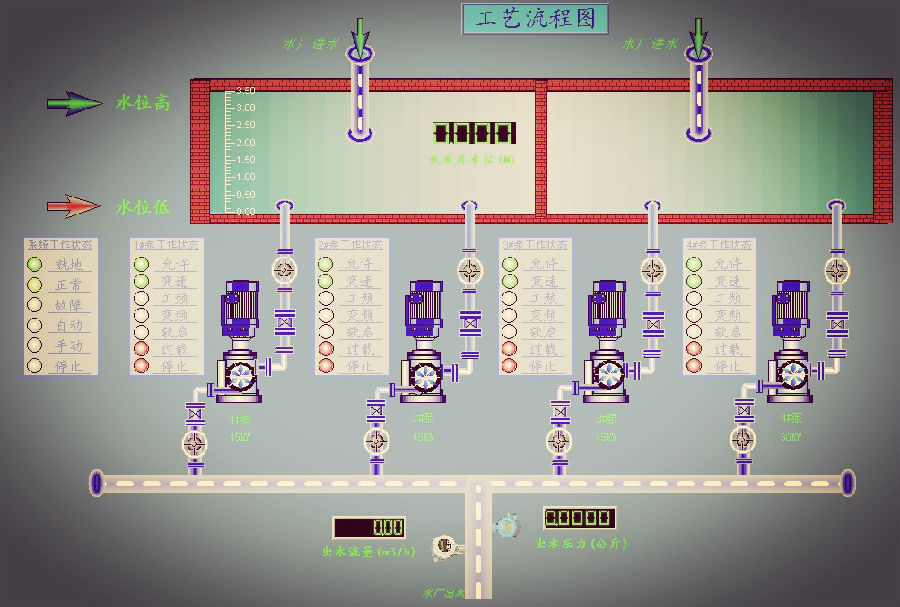 ControX在水利工程中的应用
概述 泵站计算机监控系统是一套先进的监控系统,为大中型泵站实现无人值守、少人看管、优化调度、提高运行效率和管理水平提供了可靠的设备和手段。该系统采用ControX组态软件开发现场实时监控软件,采用可
ControX在水利工程中的应用
概述 泵站计算机监控系统是一套先进的监控系统,为大中型泵站实现无人值守、少人看管、优化调度、提高运行效率和管理水平提供了可靠的设备和手段。该系统采用ControX组态软件开发现场实时监控软件,采用可
 奥博瑞光工业交换机系列产品在市政工程行业的应用方案
在市政供水、污水处理、工业制水、水文水利、集中供热、环境监控、城市灯光景观控制等市政工程,大量采用监控和自动控制系统。市政工程要求提供更可靠和抗恶劣环境的通信能力,而且往往是视频监控和数据采集控制同
奥博瑞光工业交换机系列产品在市政工程行业的应用方案
在市政供水、污水处理、工业制水、水文水利、集中供热、环境监控、城市灯光景观控制等市政工程,大量采用监控和自动控制系统。市政工程要求提供更可靠和抗恶劣环境的通信能力,而且往往是视频监控和数据采集控制同
 韩国仁川机场“零”新冠确诊,到底是如何做到的呢?
机场体温筛查分三步2020年3月3日起,仁川国际机场启用三步筛查方案,旨在识别所有出港航班上的体表温度升高的人员。所有机场用户被要求接受总共三次体表温度升高筛查检测:分别在出发层入口,出入境通关口和
韩国仁川机场“零”新冠确诊,到底是如何做到的呢?
机场体温筛查分三步2020年3月3日起,仁川国际机场启用三步筛查方案,旨在识别所有出港航班上的体表温度升高的人员。所有机场用户被要求接受总共三次体表温度升高筛查检测:分别在出发层入口,出入境通关口和
 如何选择电动汽车中霍尔电流传感器
关键词:电动汽车电流传感器,电机控制,BMS蓄电池管理文章简单介绍了电动汽车中目前电流传感器的应用方式以及产品种类,相比较传统的电流传感器,更加具有稳定性高、精度高、耐高低温等众多优点1、引言电动汽
如何选择电动汽车中霍尔电流传感器
关键词:电动汽车电流传感器,电机控制,BMS蓄电池管理文章简单介绍了电动汽车中目前电流传感器的应用方式以及产品种类,相比较传统的电流传感器,更加具有稳定性高、精度高、耐高低温等众多优点1、引言电动汽
 智能抓取 看ALSONTECH 机器人 3D定位系统如何“眼明手捷”
AT-S1000系列3D定位系统AT-S1000系列机器人3D定位系统结合多项激光扫描、相机定向技术对工件进行快速扫描,经强大的三维分析软件高效智能的分析,向机器人提供精确的定位数据,引导机器人将工
智能抓取 看ALSONTECH 机器人 3D定位系统如何“眼明手捷”
AT-S1000系列3D定位系统AT-S1000系列机器人3D定位系统结合多项激光扫描、相机定向技术对工件进行快速扫描,经强大的三维分析软件高效智能的分析,向机器人提供精确的定位数据,引导机器人将工
 PLC编程软件如何借助HiNet工业网关实现远程程序上下载
工业现场的情况错综复杂,需要工程师经常对设备进行远程调试与程序的上下载,而随着可编程控制器PLC在设备上的普遍应用,如何能通过plc编程软件对plc实现远程编程和程序上下载,是很多工程师们都关心的问
江苏中原建设集团有限公司10KV正式用电工程电能管理系统的设计与应用
赵斌安科瑞电气股份有限公司上海嘉定摘要:介绍江苏中原建设集团有限公司10KV正式用电工程电能管理系统,采用智能电力仪表采集配电现场的各种电参量和开关信号。系统采用现场就地组网的方式,组网后通过现场总线
PLC编程软件如何借助HiNet工业网关实现远程程序上下载
工业现场的情况错综复杂,需要工程师经常对设备进行远程调试与程序的上下载,而随着可编程控制器PLC在设备上的普遍应用,如何能通过plc编程软件对plc实现远程编程和程序上下载,是很多工程师们都关心的问
江苏中原建设集团有限公司10KV正式用电工程电能管理系统的设计与应用
赵斌安科瑞电气股份有限公司上海嘉定摘要:介绍江苏中原建设集团有限公司10KV正式用电工程电能管理系统,采用智能电力仪表采集配电现场的各种电参量和开关信号。系统采用现场就地组网的方式,组网后通过现场总线
专注服务于工控领域 7×8小时售后支持
全方位的技术支持 因为专注所以专业