主营:欧姆龙,三菱,安川,Pro-face
主营:欧姆龙,三菱,安川,Pro-face

内置运动程序,可实现大30轴的多轴运动控制。 提高设备设计效率并缩短加工时间 通过一个支持MECHATROLINK-II的位置控制单元, 对运动网络中多达16轴的伺服器进行控制。 MECHATROLINK II是MECHATROLINK成员协会的注册商标。
欧姆龙的系列位置和运动控制器已在mc402e的加入大大增强。 mc402e被设计作为一个PLC模块和多达四个伺服驱动轴提供多轴复杂的运动控制。 为高水平控制而设计的。
用1个单元实现多任务的4轴控制。 行业中初配置G语言的单元。 行业中初的1槽4轴同时控制的实现。

控制轴数:多16轴。 伺服放大器连接方式:SSCNETⅢ/H(1系统)。 运动控制器是指,与可编程控制器CPU组合使用的运动控制用CPU模块。

控制轴数:多32轴。 伺服放大器连接方式:SSCNETⅢ/H(2系统)。 可进行高度运行控制,自由对应。

控制轴数:多16轴。 插补功能:直线插补(大4轴),圆弧插补(2轴),螺旋插补(3轴)。 PLC容量:60k步。
.jpg)
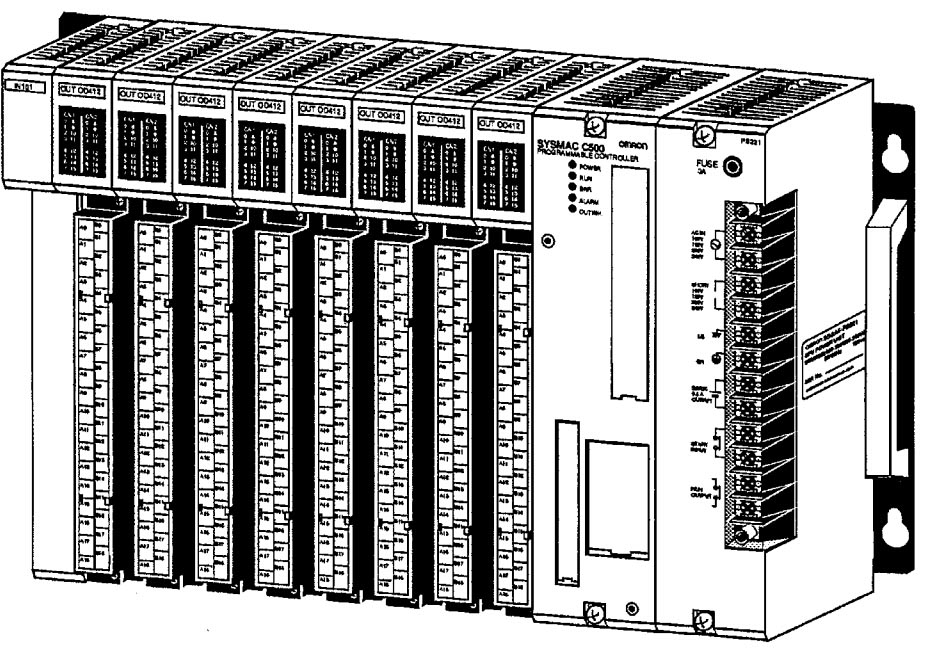
输出方式: C500-NC113与伺服驱动器连接,通过。 SYSMAC传送位置数据, 进行定位。 运动控制(MC)是自动化的一个分支, 它使用通称为伺服机构的一些设备如液压泵, 线性执行机或者是电机来控制机器的位置或速度。
.jpg)
输出方式: C500-NC211与伺服驱动器连接,通过。 SYSMAC传送位置数据, 进行定位。 运动控制(MC)是自动化的一个分支, 它使用通称为伺服机构的一些设备如液压泵, 线性执行机或者是电机来控制机器的位置或速度。

控制轴数:多16轴。 插补功能:直线插补(大4轴),圆弧插补(2轴),螺旋插补(3轴)。 PLC容量:30k步。

控制轴数:16轴。 结构紧凑的Q170MCPU集成了电源模块、PLC和运动控制器, 并内置了包装设备中使用的增量型同步编码器信号和标记检测信号所需的接口, 不需另外添加相应的模块。 其他多CPU平台, 需要做许多的选型配置才能确保运动CPU和PLC CPU正常通讯, 这将花费工程师许多宝贵时间。

控制轴数:16轴。 结构紧凑的Q170MCPU集成了电源模块、PLC和运动控制器, 并内置了包装设备中使用的增量型同步编码器信号和标记检测信号所需的接口, 不需另外添加相应的模块。

规格:容许再生功率:300w,电阻值:40欧。 用途:MR-JE-70B、MR-JE-100B、MR-JE-70A、MR-JE-100A用。

规格:容许再生功率:500w,电阻值:13欧。 用途:MR-JE-200B、MR-JE-300B、MR-JE-200A、MR-JE-300A用。

规格:容许再生功率:100w,电阻值:40欧。 用途:MR-JE-100B及MR-JE-100A以下用。

规格:容许再生功率:30w,电阻值:40欧。 用途:MR-JE-100B及MR-JE-100A以下用。

级别:3相200V级别。 连接电阻:17Ω以上。 内部电阻值:120W、180W。

级别:3相400V级别。 连接电阻:34Ω以上。 内部电阻值:120W、180W×2(串联)。

级别:3相200V级别。 连接电阻:17Ω以上。 内部电阻值:120W、20W。

小型(外径φ25)。 增量型。 外径:φ25。

小型(外径φ25)。 增量型。 外径:φ25。
专注服务于工控领域 7×8小时售后支持
全方位的技术支持 因为专注所以专业